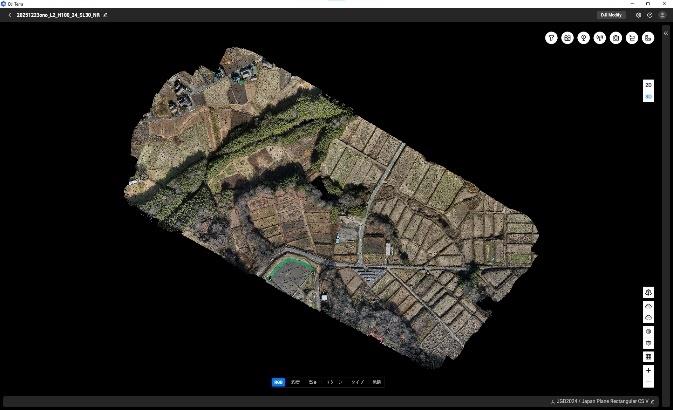
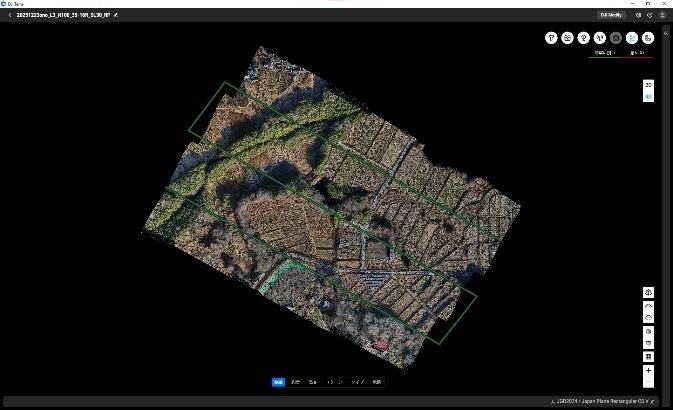
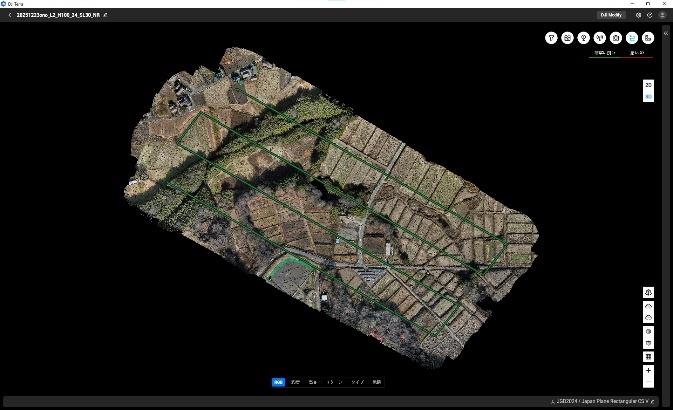
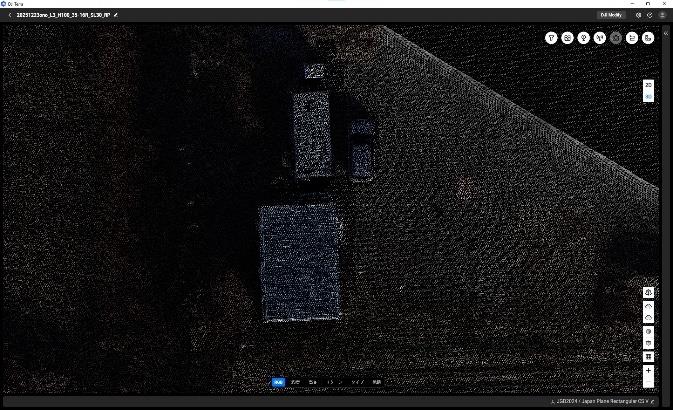
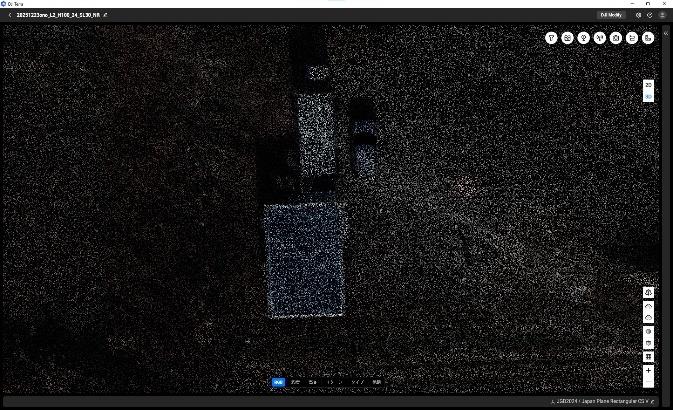
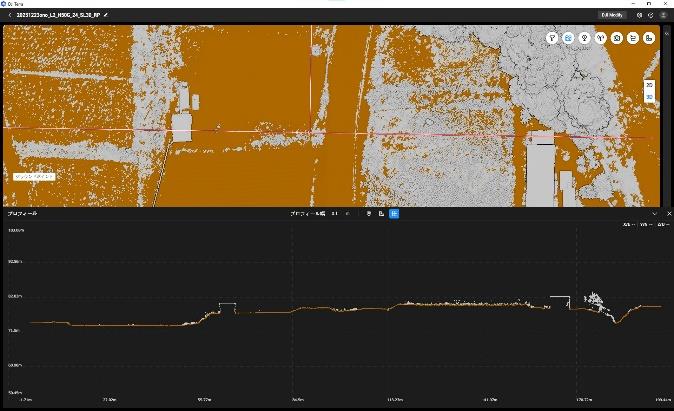
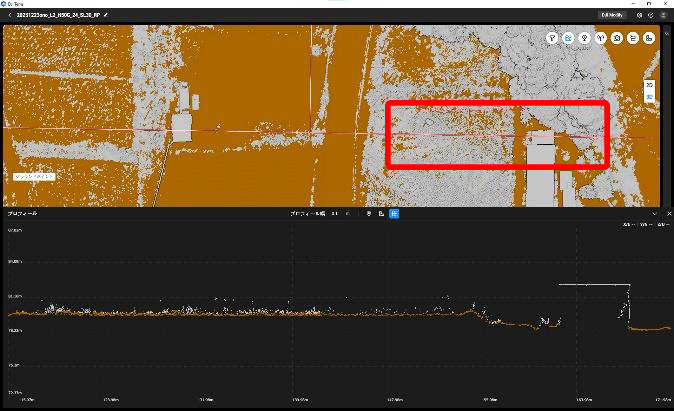
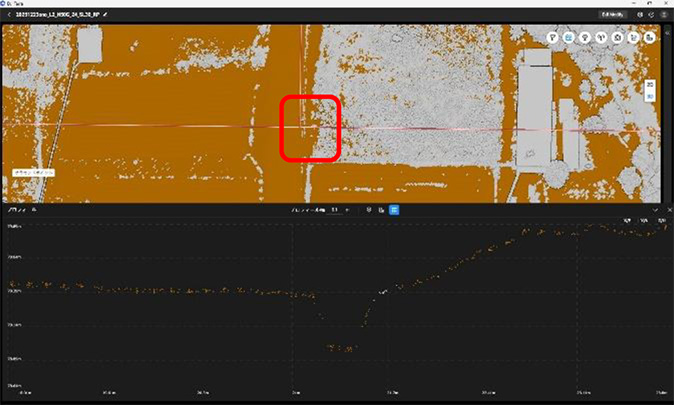
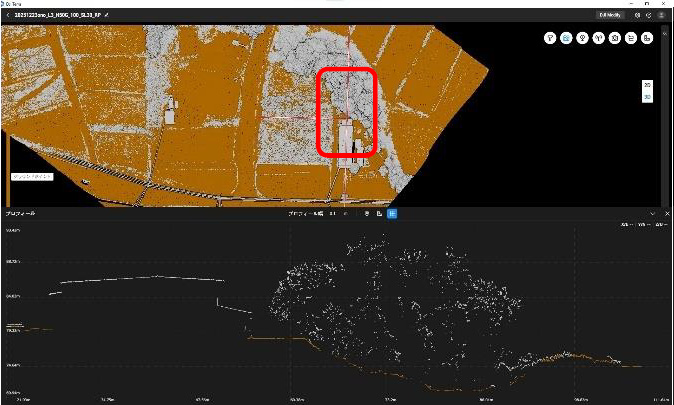
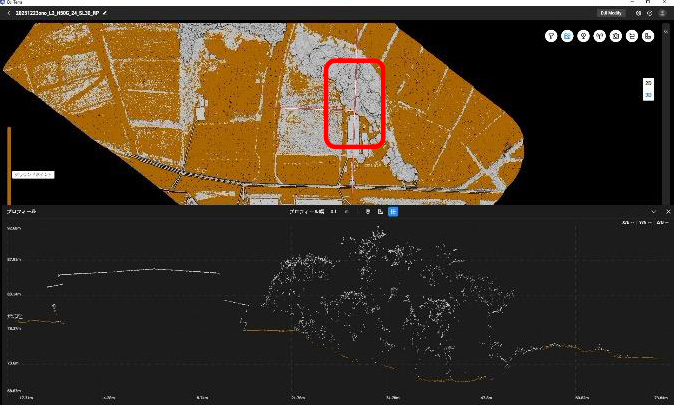
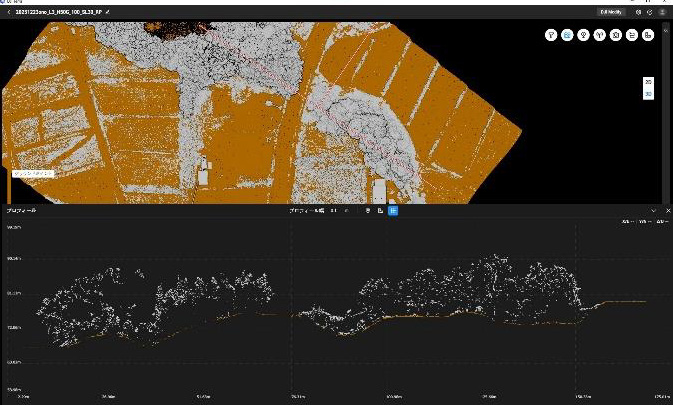
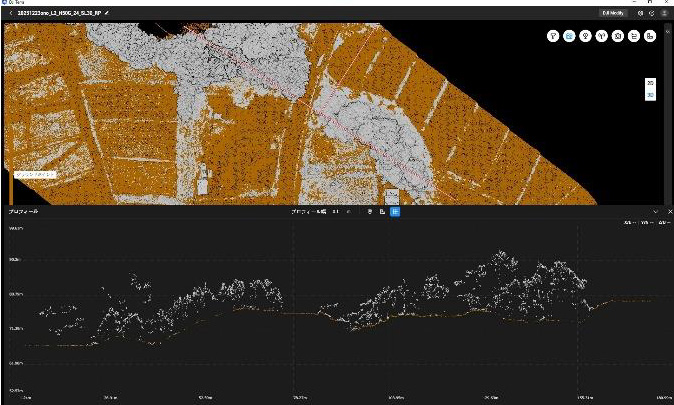
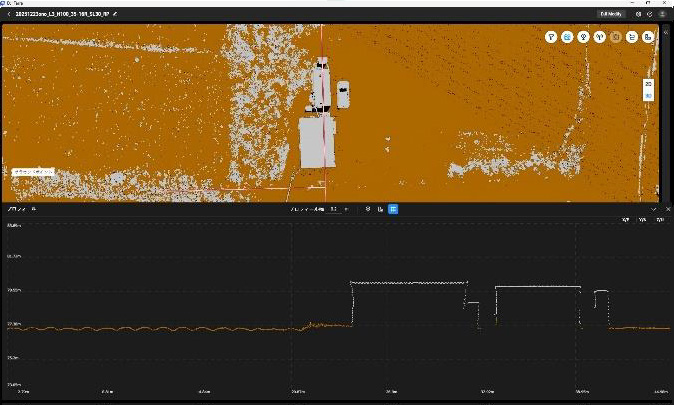
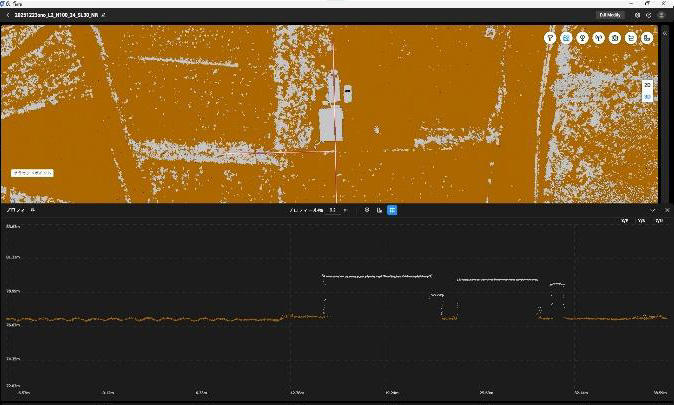
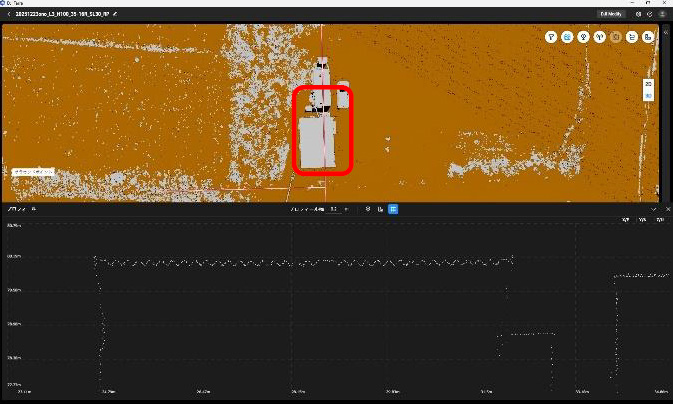
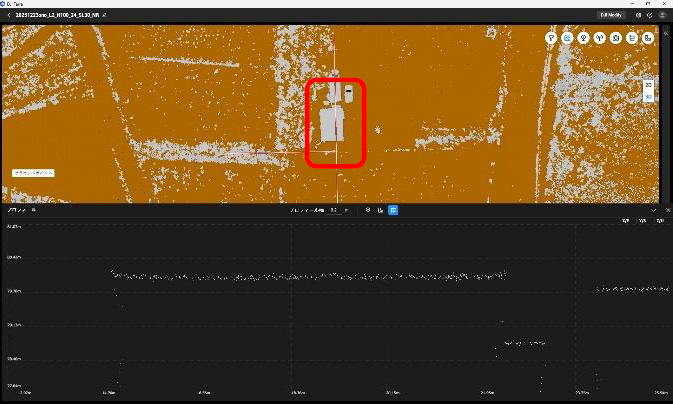
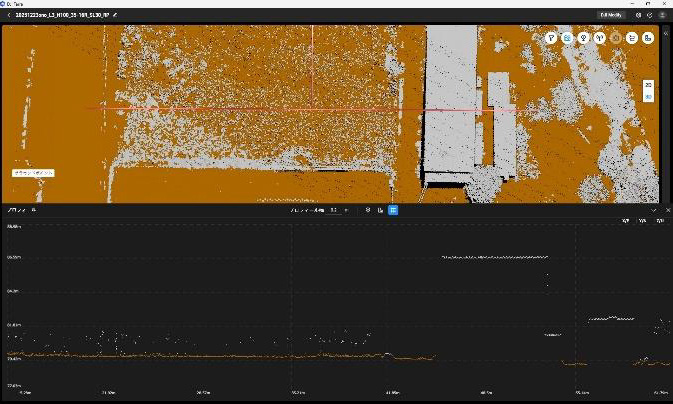
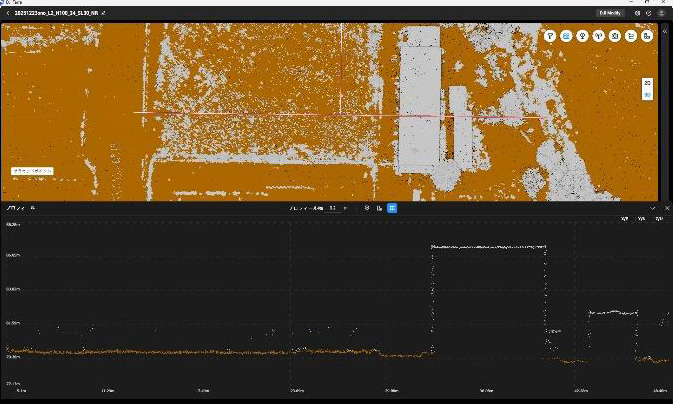
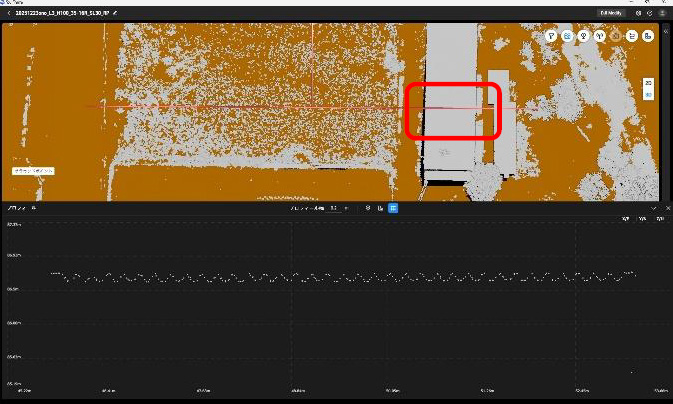
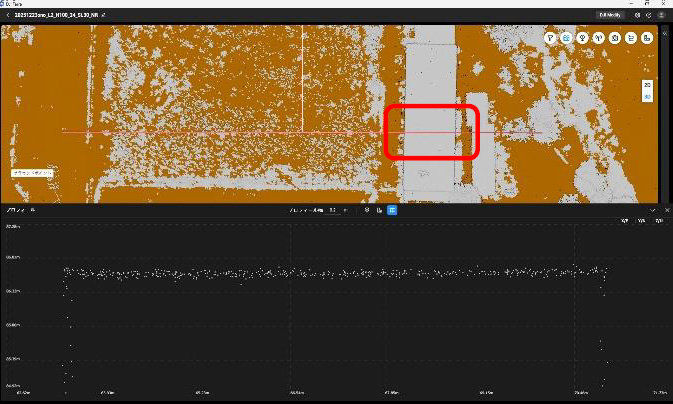
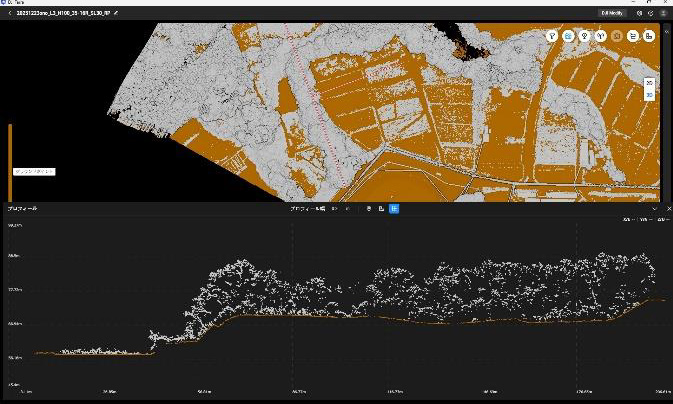
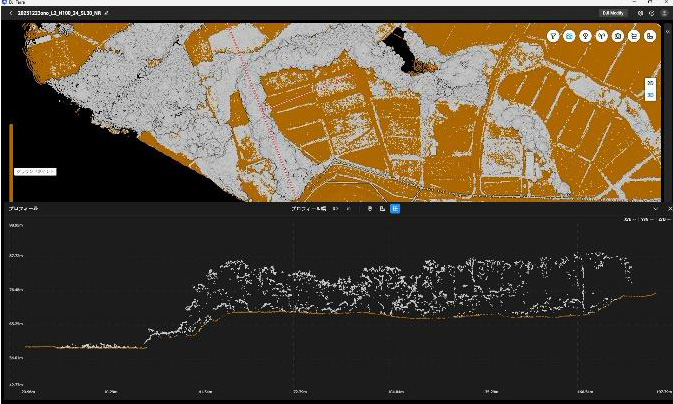
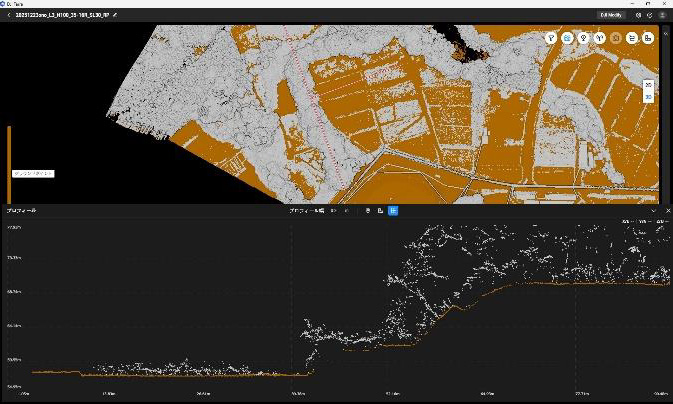
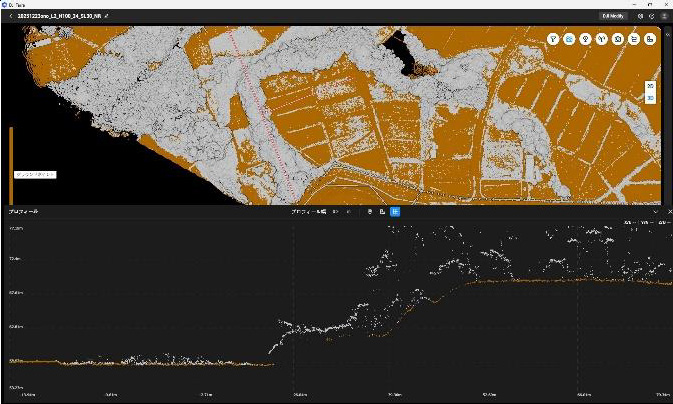
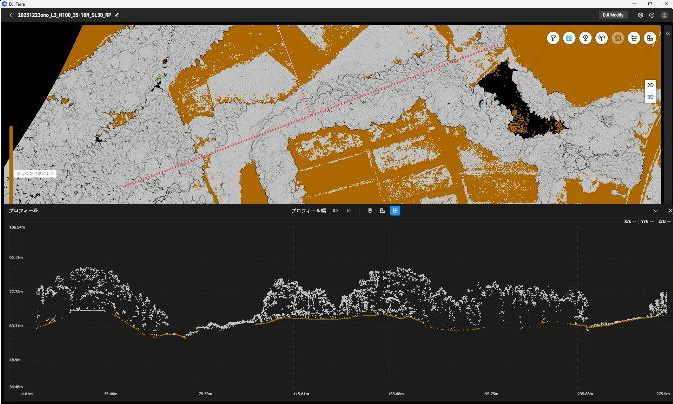
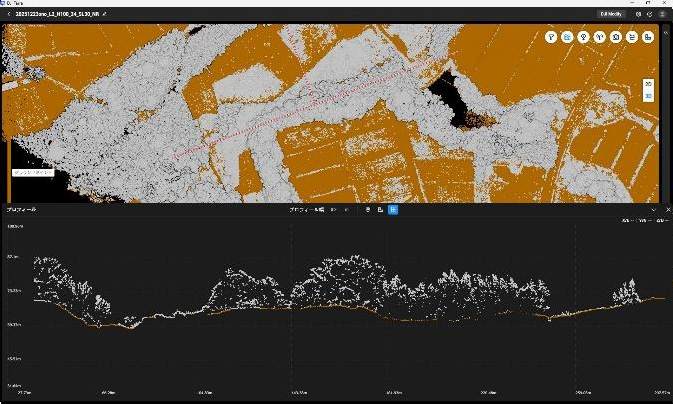
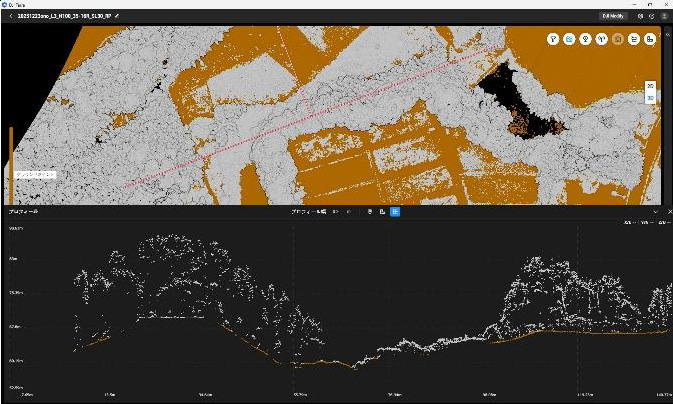
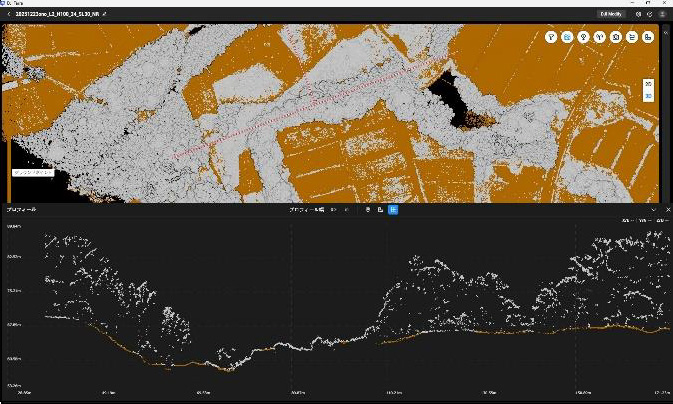
2025年12月23日から弊社小野トレーニングセンターにおいて実施したDJI社の新型LiDARセンサーZenmuse L3の性能検証結果を報告する。
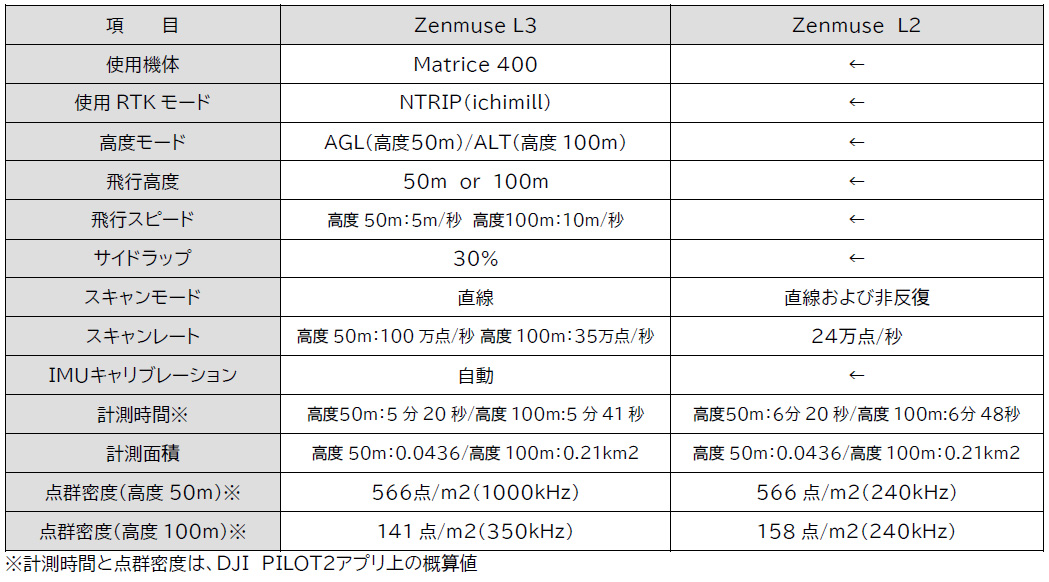
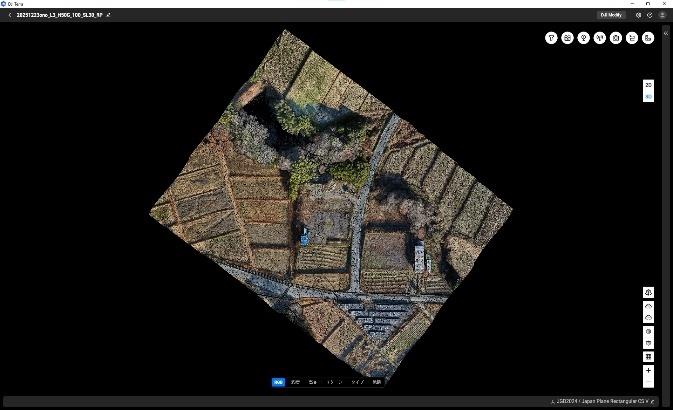
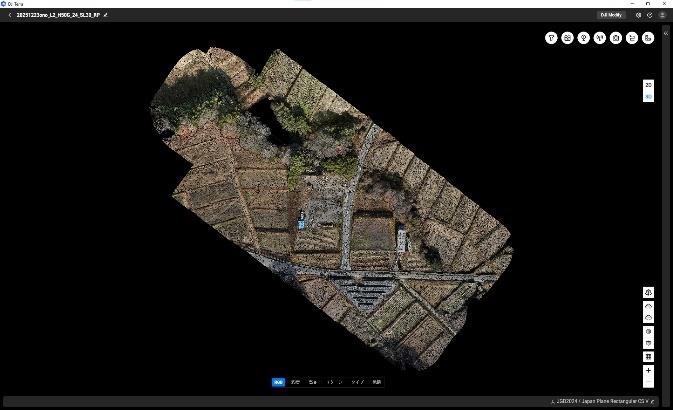
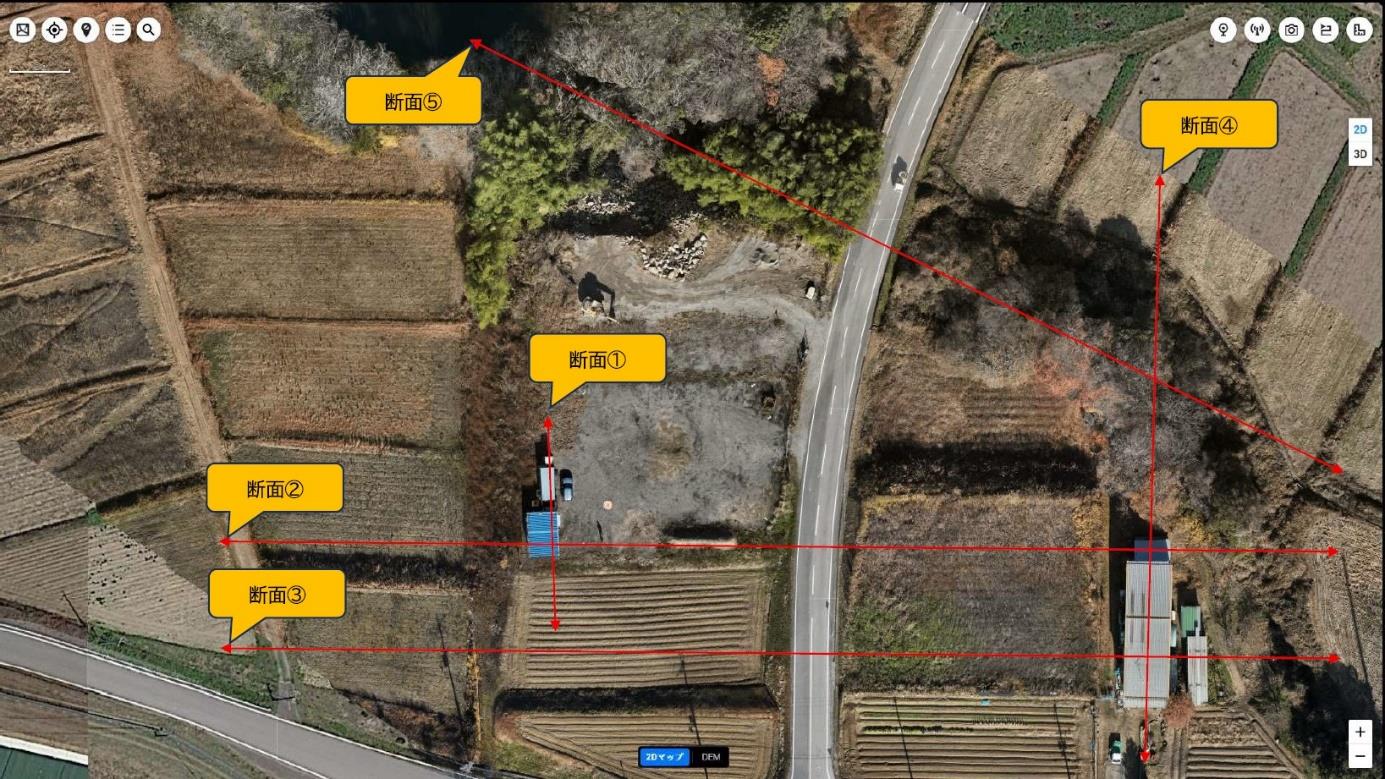
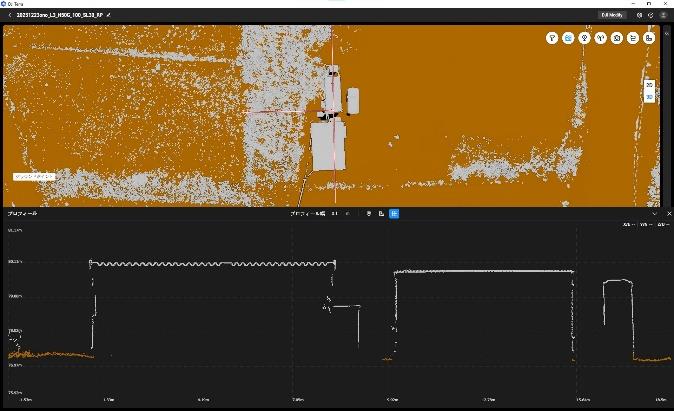
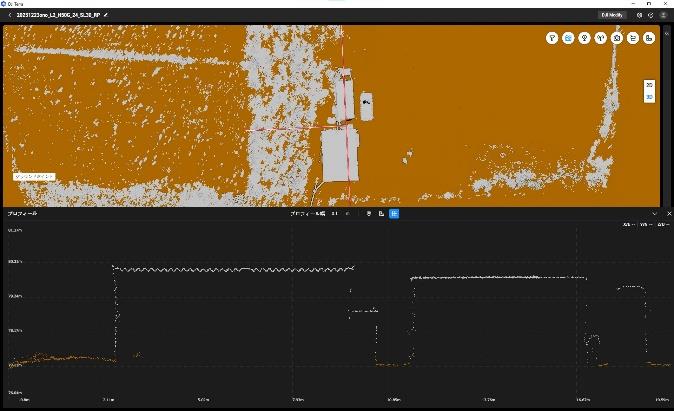
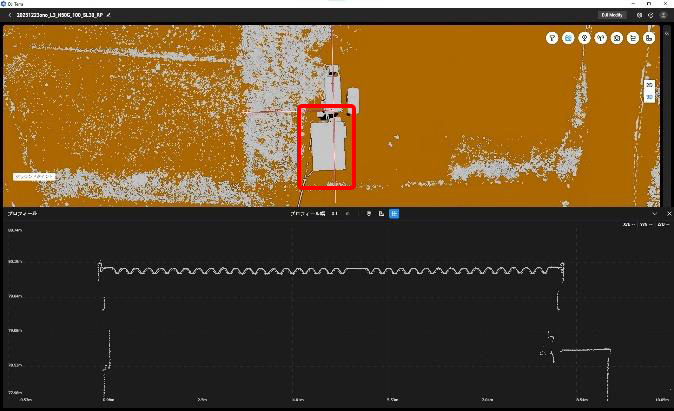
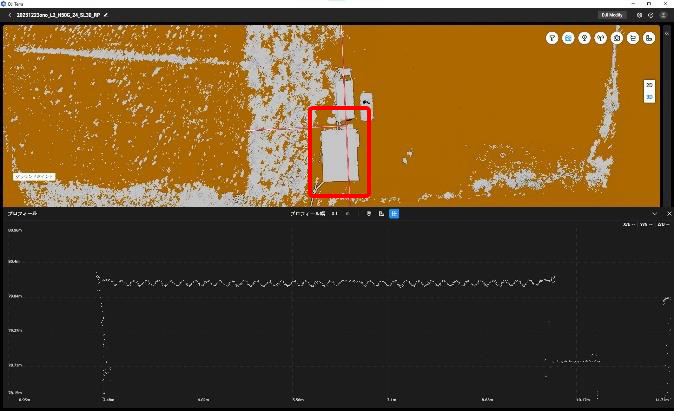
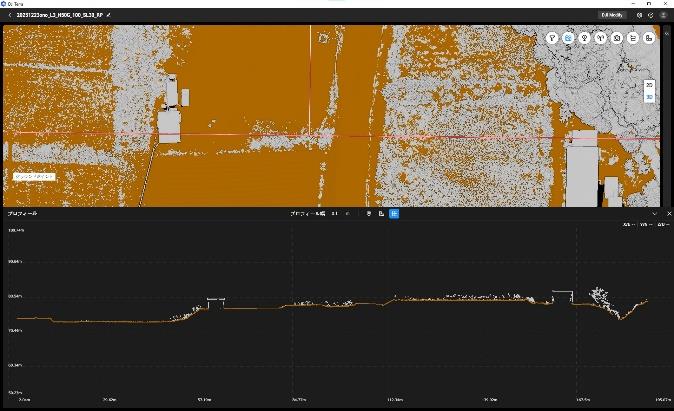
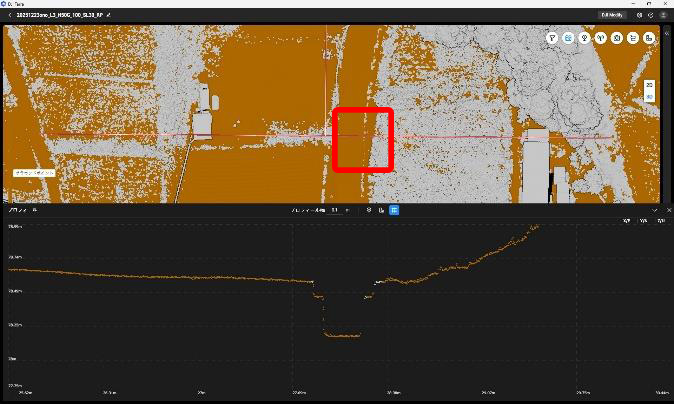
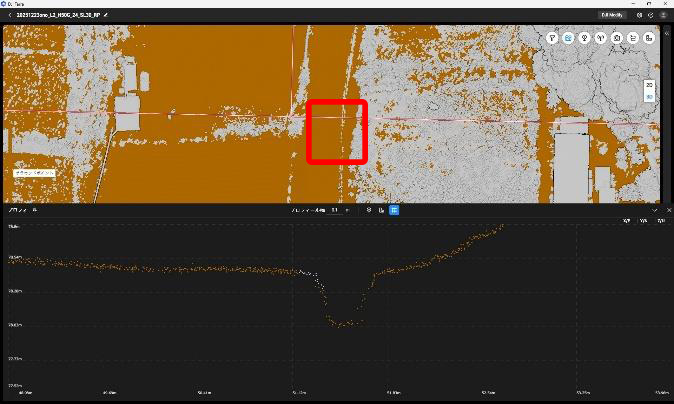
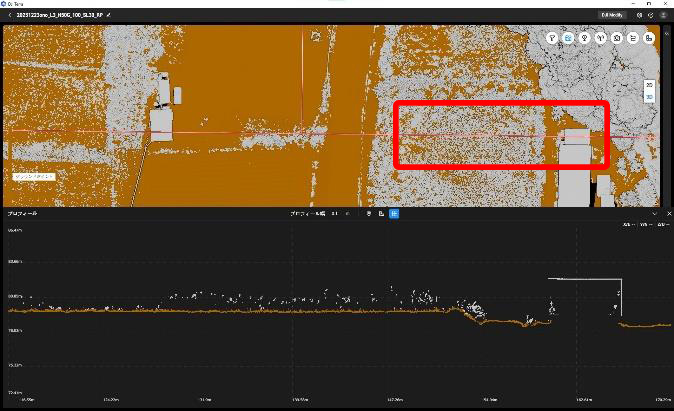
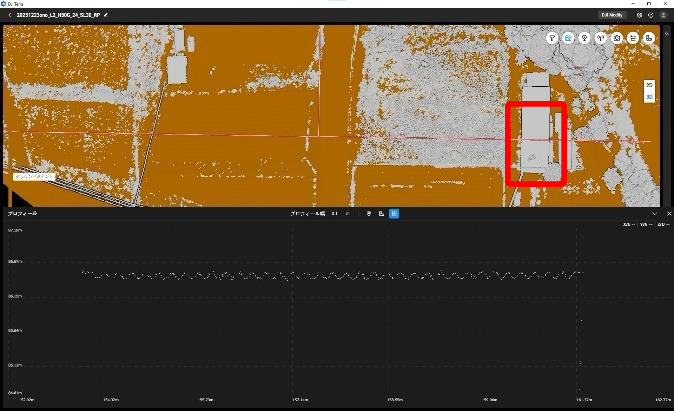
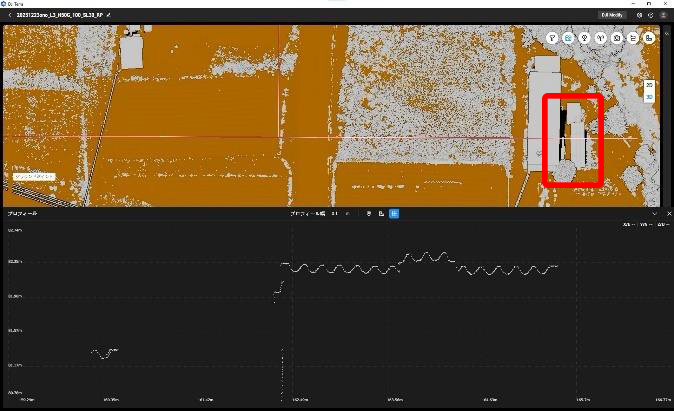
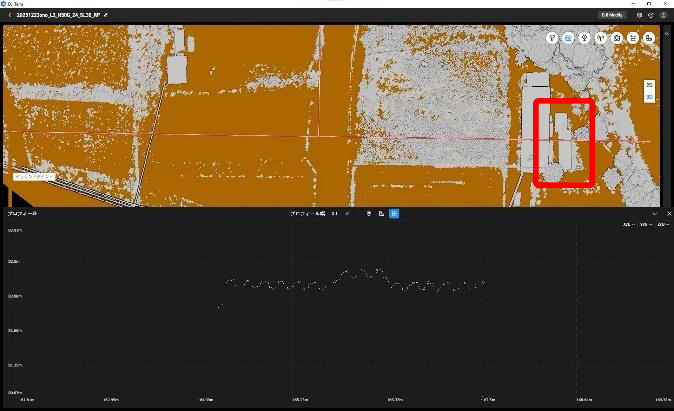
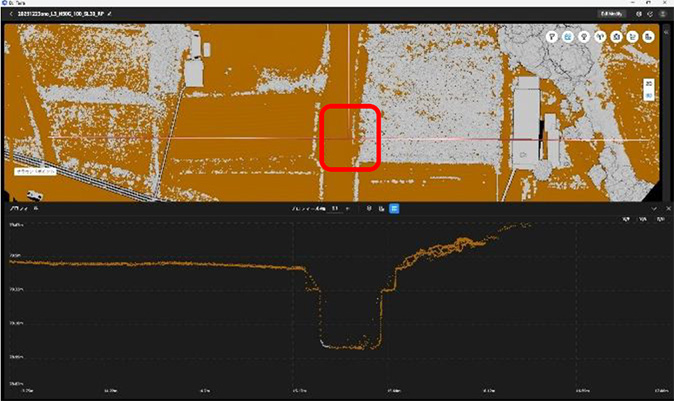
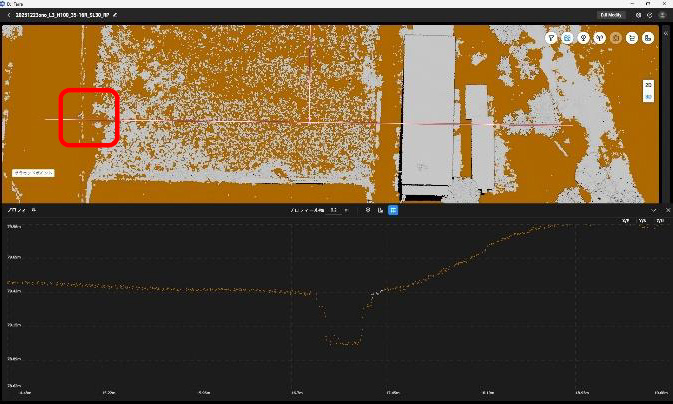
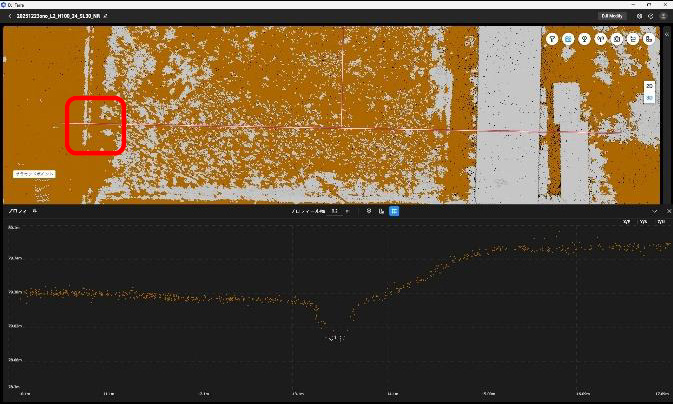
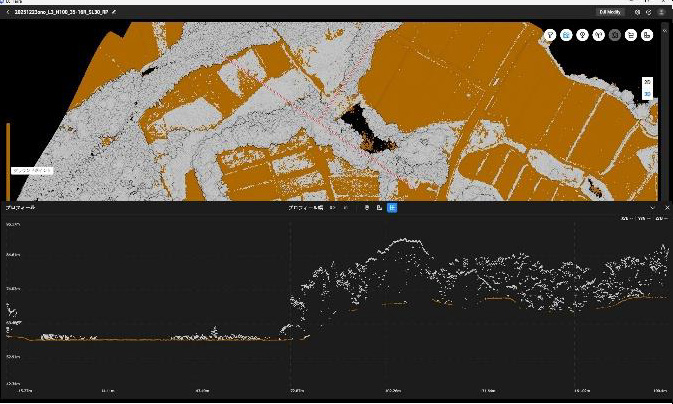
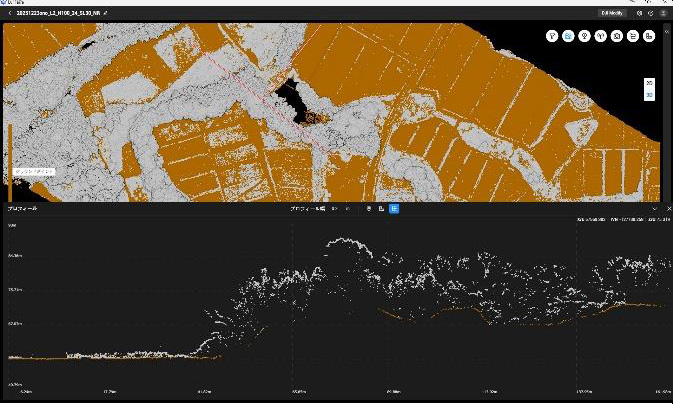
検証方法は、前モデルのZenmuse L2と比較する形で行った。同エリアを高度50m時と高度100m時でエリアミッション飛行を実施し、可能な限り同じ設定(あるいは各機種の最高性能)にて行い、計測した点群データをいろいろと比較してみた。
はじめに筆者所感として、2025年11月某日にDJI Zenmuse L3が発表され、その詳細スペックが判明した時は、正直少し残念だった。
なぜならZenmuse L2が非常に完成度の高い製品で、設定方法や使い勝手もシンプルで非常に良かったため、そのL2の後継機種が2年の短期間のうちに発表されるのであれば、いつものごとくもっと革新的な製品を連想していたからだ。
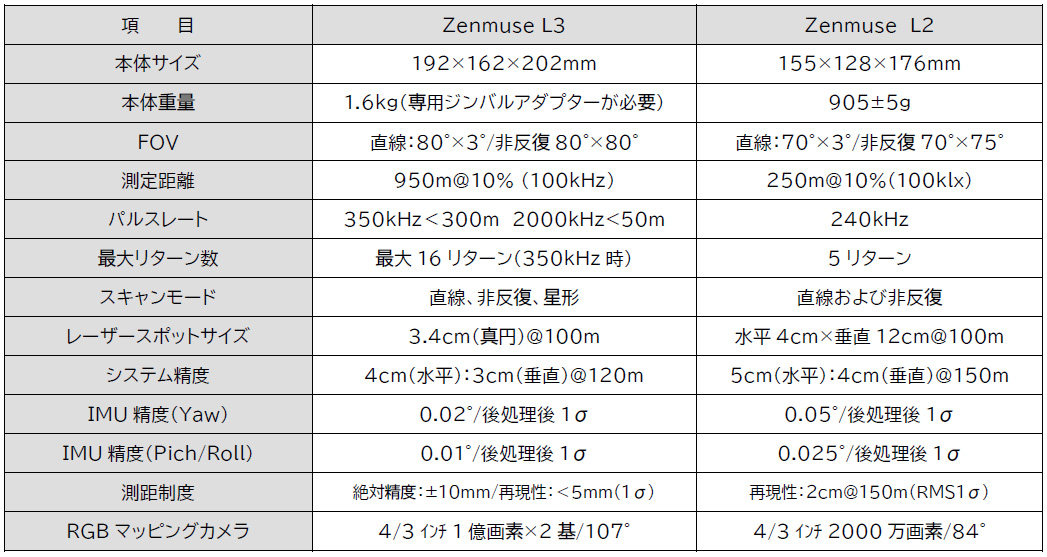
発表されたスペックを見る限りでは、IMUや測距精度に関しても若干向上はしているものの点群システム精度自体は地上スキャナー並みに大幅に向上したわけではなく、ましてや今巷で話題になっているSLAM技術が導入され、非GPS下や手持ちでの計測が可能になるというわけでもなく・・・
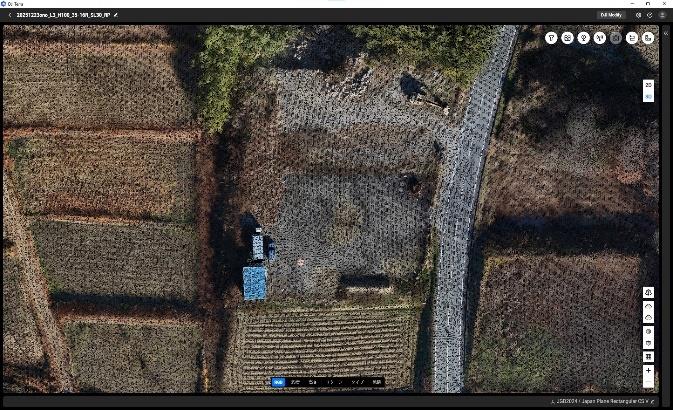
大きく進歩した点としては、測定距離の大幅な向上とレーザースポットサイズの大幅縮小、搭載カメラの1億画素化などでレーザースポットサイズ以外は、筆者が求めている機能とは少し乖離があった。
だが、実際にL3の実機を使用してみて、なかなか興味深い結果となったことをお伝えしておく。
いつもの事ながら、この製品を短期間にこの価格帯で市場に投入できるDJI社の技術力や機動力にはいつも驚かされるばかりだ---