KSI
LIDAR Scanner
Drone


・軽量コンパクト(1200g以下)
・正確な三次元座標を取得
・高環境性(IP65) ※スキャナーのみ
・測距範囲300m(従来比1.2倍)
・高コストパフォーマンス
・簡単操作
・スキャンレート:60Hz(従来比1.5倍!)

※スキャナー:ドイツTriple-IN社製 PS lightweight
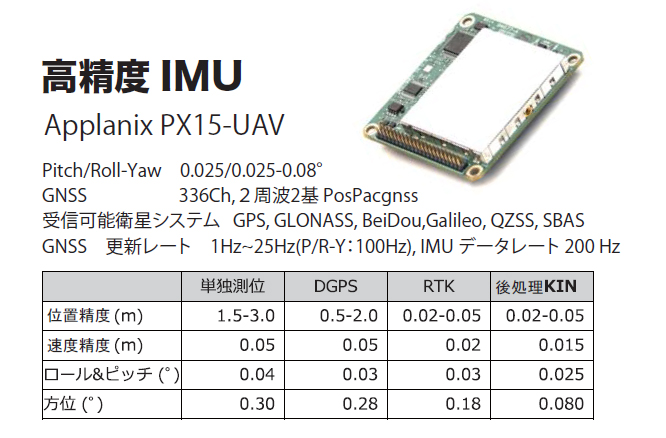
※POS:APLANIX社製 APX-15 使用後処理プログラム: (株)ISP社様 LandForms
UAVレーザーシステム
・スキャナーは最大300m計測可能
・独自のユニットと独自システム
・搭載するUAVを選ばない
・高いコストパフォーマンス
・ランニングコスト不要
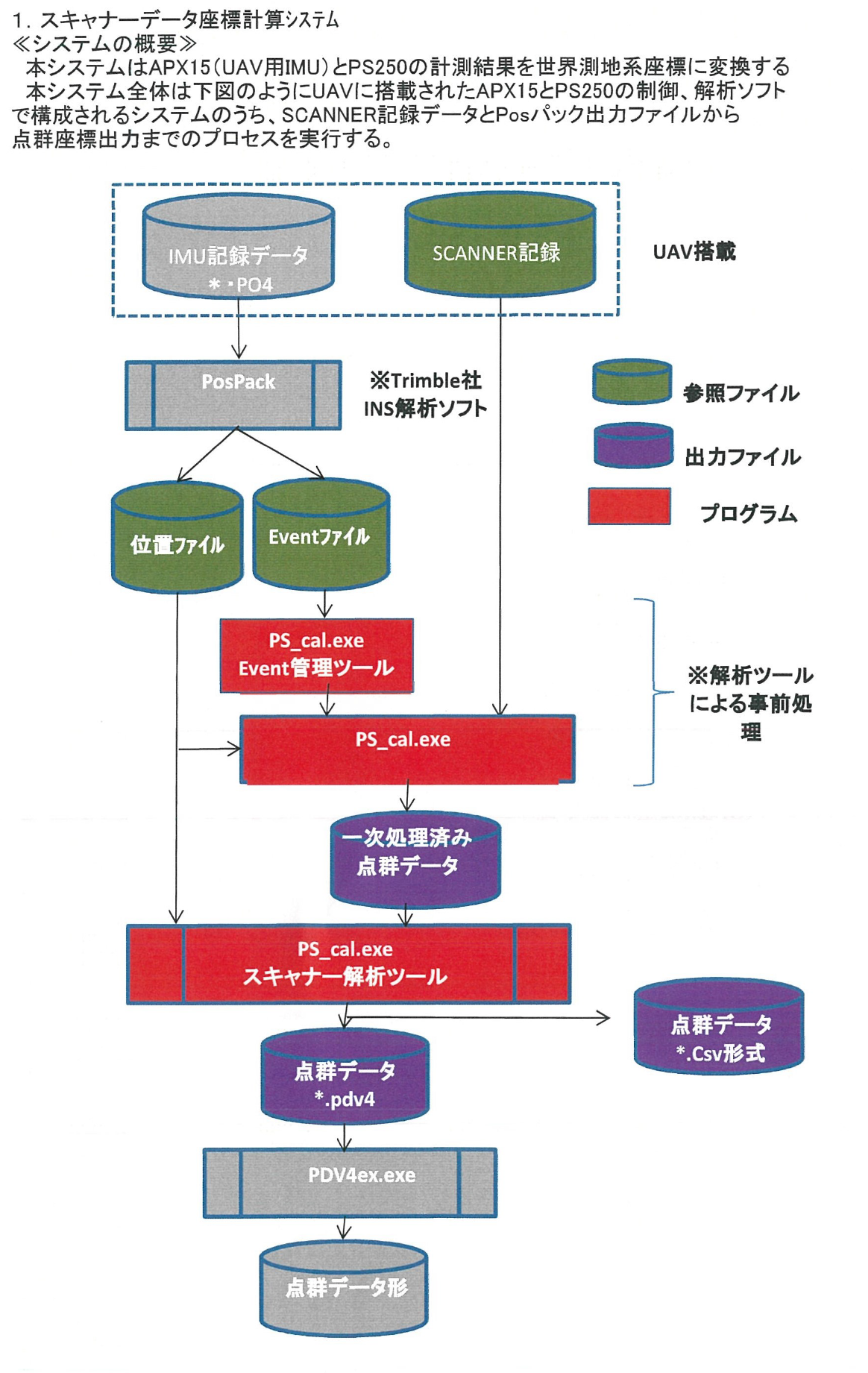
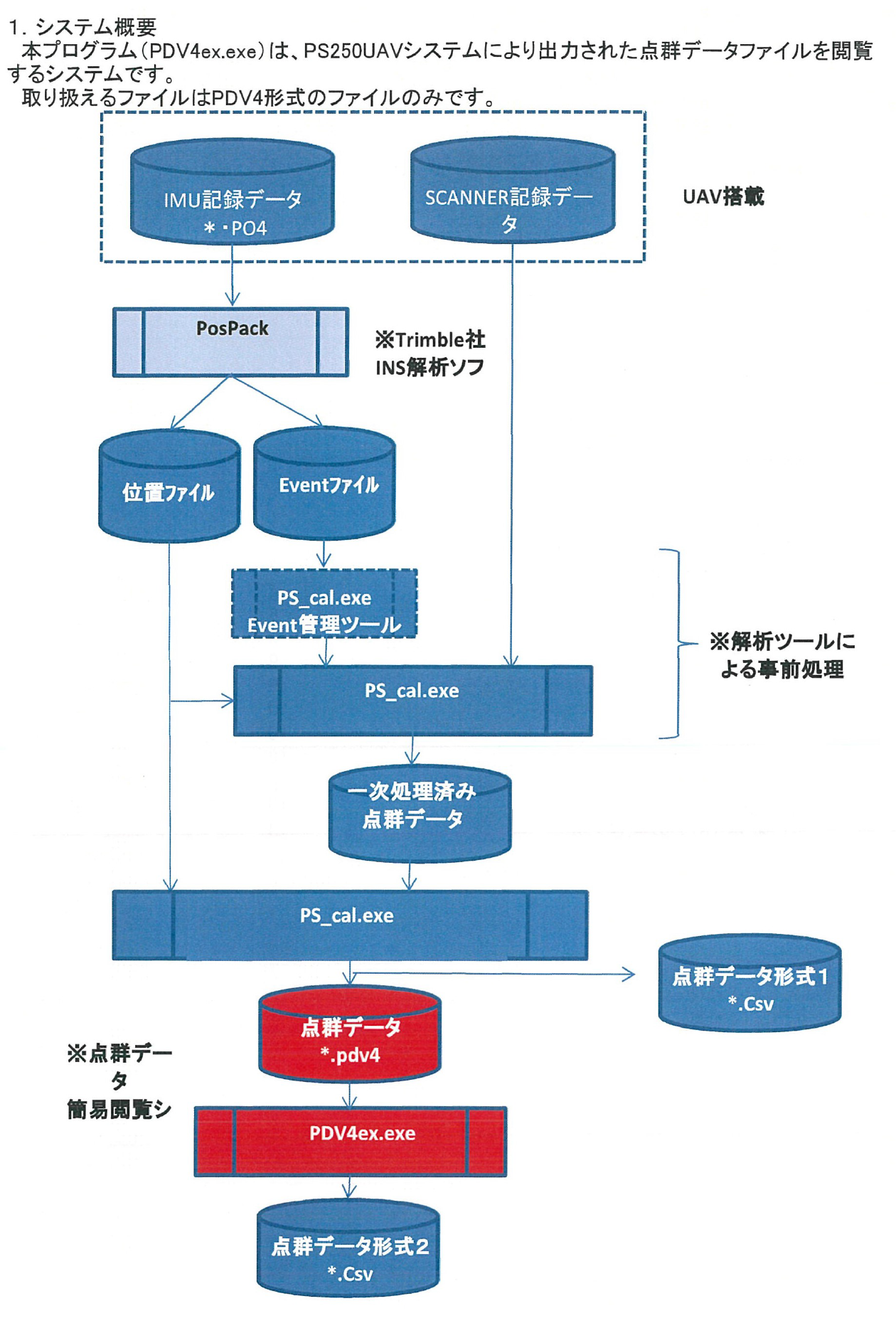
システム概要
本製品には、UAVにスキャナー、IMU、記録媒体、APX、通信機器、内蔵PC、作成プログラムを搭載。そのため位置情報、機体の姿勢、方向が3D点群データとして作成可能。
| 型番 | PS Lightweight | PS Lightweight RM |
|---|---|---|
| 測定範囲(反射率100%) | 300m | |
| 繰り返し精度 | ±5mm | |
| 精度(定誤差) | ≦5mm | |
| 分解能 | 1mm | |
| センサー近傍のスポット | 12×18mm | |
| 焦点距離 | 45m | |
| プロファイル角 | 90° | |
| スキャンレート | 30Hz(ノーマル)、30Hz(ファイン)、60Hz(ファスト) | |
| スキャンステップ | 0.09°(ノーマル)、0.0225°(ファイン)、0.18°(ファスト) | |
| スキャン速度(90°) | 16.65ms(ノーマル)、134ms(ファイン)、8.5ms(ファスト) | |
| 保護等級 | IP65 | なし |
| レーザークラス | 1M(EN60825-1;94,96,01) | |
| スキャン点数 | 約3万点 | |
| 電源電圧 | DC24V ±5V | |
| 動作温度範囲 | 作動時:-10~50℃ 保管時:-30~70℃ | |
| 材質 | ポリカーボネート | なし |
| 外形寸法 | W125×D120×H261mm | W108×D90×H225mm |
| 重量 | 1.2kg | 1.1kg |
※PS Lightweight RMに記載のない部分は共通
例 搭載ドローン
Matrice600 Pro
【ホバリング精度】垂直: ±0.5 m, 水平: ±1.5 m
【最大離陸重量】約15.5k g
【最大飛行時間】積載無し32 分、積載6kg:16 分
【対角距離】 1133mm
【機体寸法】 1668 mm x 1518 mm x 727 mm
【最大旋回速度】 ピッチ: 300°/s、ヨー: 150°/s
【最大速度】 40m/h、65km/h ( 無風時)
造成現場・鉱山・送電線・災害地・産業廃棄物・森林
本製品はUAVにスキャナー・IMU・記録媒体・通信機器器を搭載し得られたデータより位置情報(姿勢データ)スキャンデータを合成し、3次元点群データを作成しテキスト出力をするシステムです。
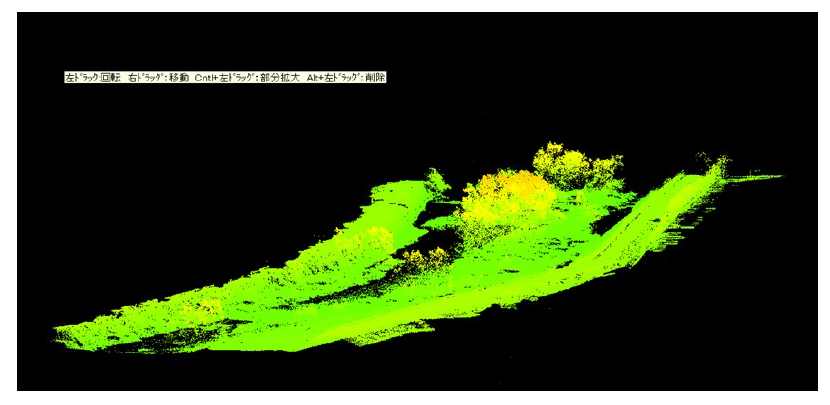
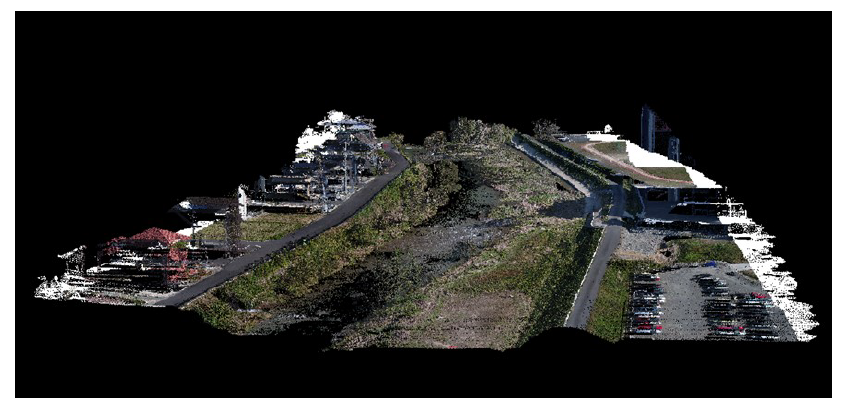
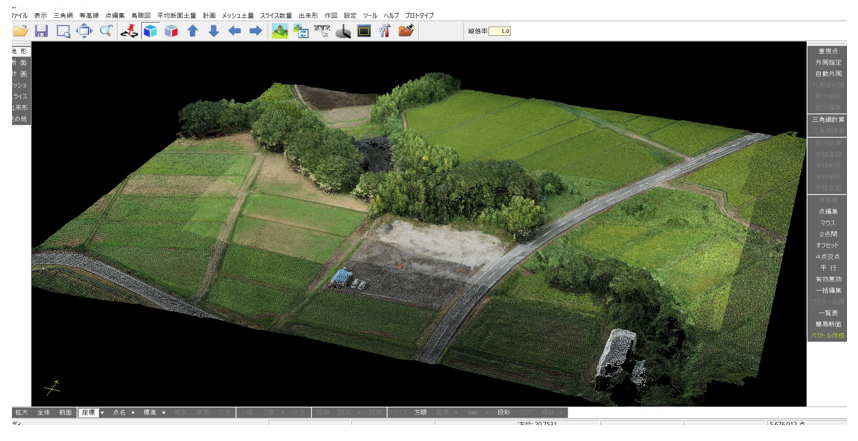
得られた点群データは他社製後プログラムによって写真データ(オルソ画像)と合成しカラー3D点群にしたり土量計算を行うことが出来ます。
本製品は計測用ユニット(スキャナー・IMU・記録用PC・電源・通信ユニット・観測用プログラム)+位置情報解析プログラム+点群作成プログラム(解析・閲覧および出力)で構成されています。
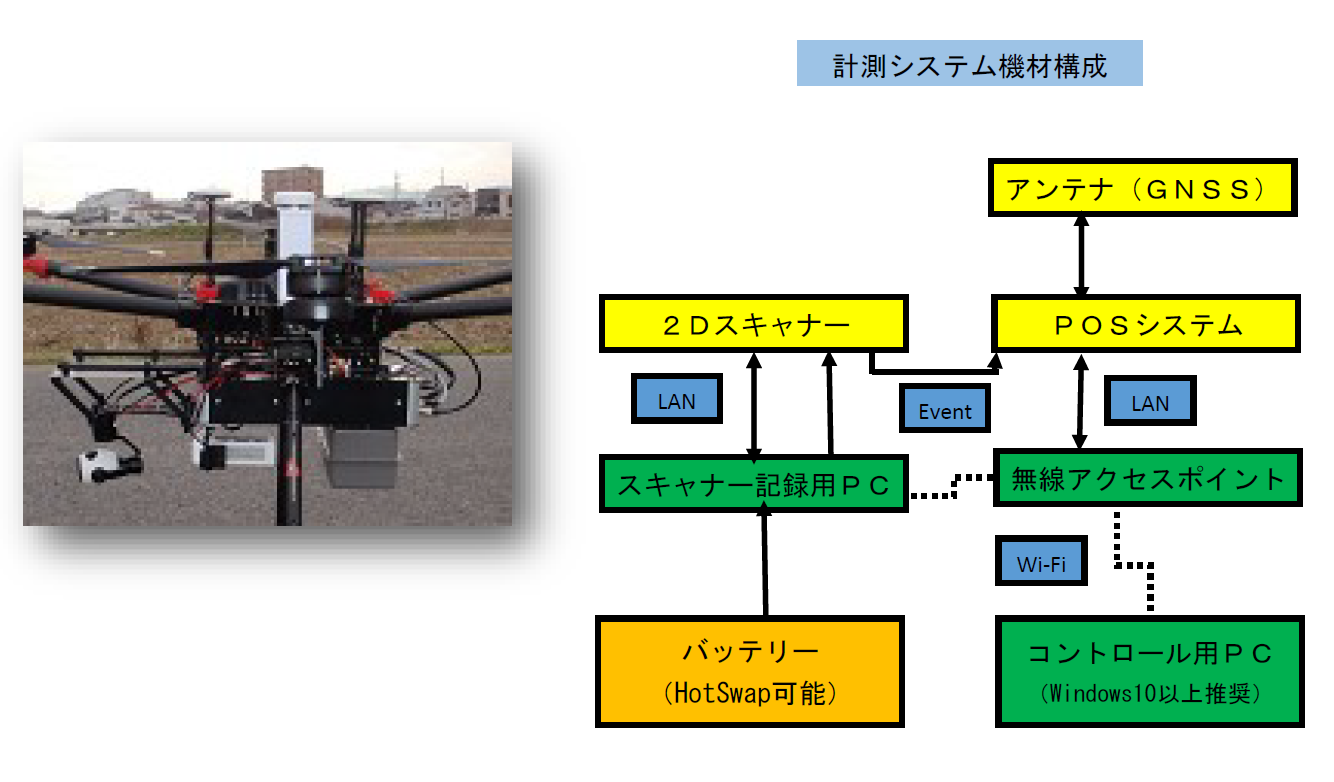
Image Description
①現場実測
・観測準備(UAVキャリブレーション・各部接続・IMUキャリブレーションなど)
・計測(スキャナー・POSデータの取得)
・データ取込(Wi-Fi通信)
②位置情報(GNSS)解析(Trimble製POSPac使用)
③スキャンデータ・位置情報合成(PS_CAL使用)
④点群作成(PS_CAL使用)
・スキャナー解析
・計算条件入力(コース・範囲など選択)
・ボアキャリブレーション(Pitch・Roll・Yawの補正)
⑤画像閲覧(PDV4使用)
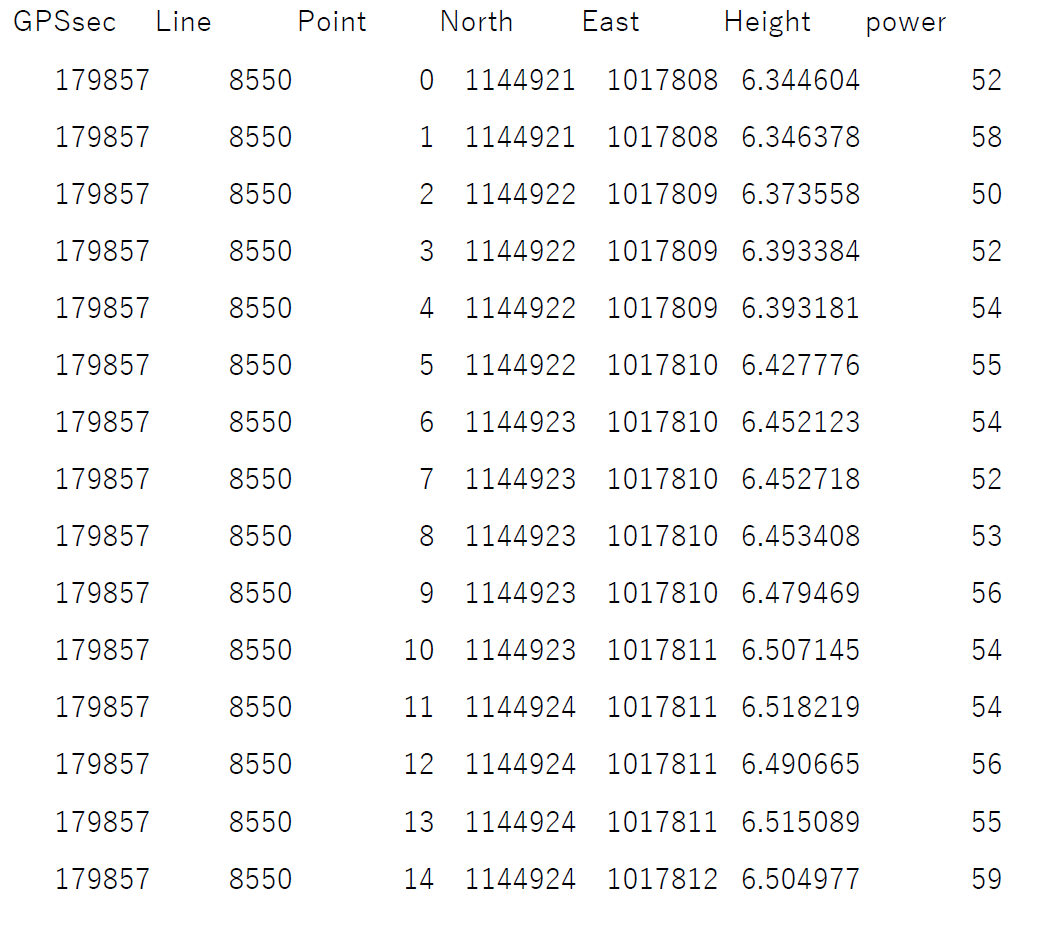
データ出力(3次元点群データのテキスト出力)
※上記で得られた点群データを各社点群後処理プログラムへ出力)
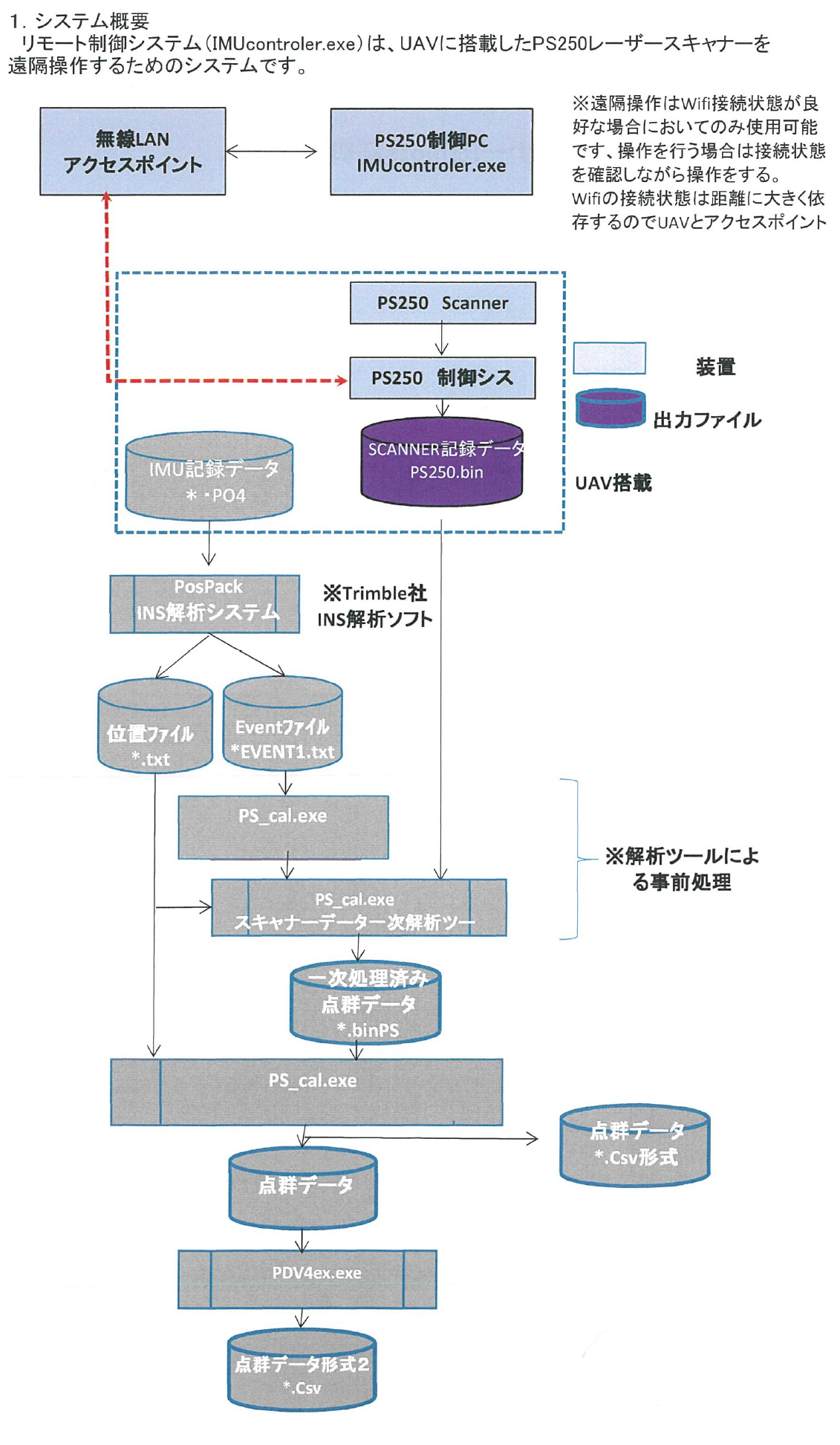
(※POSデータはPOSPacで計算)