自動車にデジタルカメラと3次元レーザースキャナを搭載し、道路およびその周辺映像・3次元データを取得することでGISの3次元データの取得を容易に行うことができ、さまざまな業務に役立てられます。
ライカジオシステム製の3次元モバイルマッピング・ソリューションは、自動車搭載型で短時間で広範囲なデータ取得が可能な「Pegasus:Two」とウェアラブル(着用可能)で屋内など自動車の侵入が困難な場所でのデータ取得が可能な「Pegasus:Backpack」の2種類があります。

データの取得から成果品の生成までを1台で完結するライカジオシステムズのモバイルマッピング・ソリューションです。カメラや追加センサー用の外部トリガーおよびシンクアウトプットが付いたLiDARプロファイラなど、統合したハードウェアを提供。簡単にフライイン、データ収集、フライアウトが可能です。なお、専用車両や車両の改造は不要です。
また、バッテリーを搭載しているため、長時間の計測が可能です。
Leica Pegasus:Twoは、キャリブレーション済みの画像と点群データの両方を取得します。つまりデータの取りこぼしがありません。360度の完全な視野とLiDAR情報を完璧に同時取得するため、再計測の必要はありません。 また、舗装状態を分析するオプションの道路用リアカメラをご利用いただくことでビジネスチャンスはさらに広がります。一度の計測で2倍の成果が期待できるのです。
Leica Pegasus:Twoは、データ取得、キャリブレーション、Novatelに対応した後処理、対象物のデータ抽出、GISベースのプラットフォームですぐに参照できるレイヤー化したデータ保存など、あらゆる処理をサポートするソフトウェアを備えているので1台で完璧なワークフローをお約束します。
また、光センサーを備えているため、後処理後の画像はすぐに使用できます。データの取得から抽出まで、これ以外のツールは必要ありません。
●光センサーによるイメージデータ取得時の輝度・バランス自動コントロール機能
●オプションのドーム式カメラでのキャリブレーション済みの360度のビューによるシティモデリング
●画像データと点群データがキャリブレーション済みの直感的なプラットフォーム1つに統合
●追加センサー用の外部トリガーアウトプットおよび外部タイムスタンプ
●購入後に地上スキャナーとプロファイラを個別に追加し、ユーザーがキャリブレーションを実行することも可能
●専用車両や車両の改造は不要
●Esri® ArcGIS for Desktopとの互換性
●最新のGNSSレシーバを利用
●画像から、あるいは点群データ内で対象となる3Dデータを収集/編集
●データの量と質、およびスケジュールと後処理スピードを考慮しながら作業を実行
詳細につきましてはライカ モバイルマッピングソリューションLeica Pegasus:Twoをご覧ください。

ライカ Pegasus:Backpackは、ユニークなウェアラブル(着衣可能)のセンサープラットフォームで、移動体計測機器、カメラ、レーザープロファイラーを搭載しています。カーボンファイバーにより軽量化を図り、人間工学に基づいて設計された非常にコンパクトなシステムです。Pegasus:Backpackはハードウェアだけではなく、屋内・屋外で得たデータを効率的にプロフェッショナル仕様の書類を作成するツールまで提供します。
●データの取得中でもシェープファイルでの点群取得
●対象の追加が可能
●様々なCADシステム (DWG, DXF, SHP, GDB, DGN, E57, HPC, LAS, PTS, NMEA, KMZ) へのエクスポート機能
●半自動データ抽出ツール
●画像による特定対象物への高速ナビゲーション
●画像と点群データが常に同期 – マウスカーソルにより選択した両データは継続的に “スナップ”
●精確な計測を行うレーザー点群への高速アクセス
●画像ステレオ立体視による3D計測技術
●陰になった点や計測できない点も写真測量の処理で取得可能
●データ取得中はGIS ユーザーインターフェースベースで現在地を表示
●データ取得中はすべてのカメラ、およびレーザー点群のライブ映像を同時に表示
●データ取得モジュールによりGNSSの取得状況を表示
●データ取得中のシステム状況をライブで監視
詳細につきましては、ライカ モバイルセンサープラットフォーム Pegasus:Backpackをご覧ください。
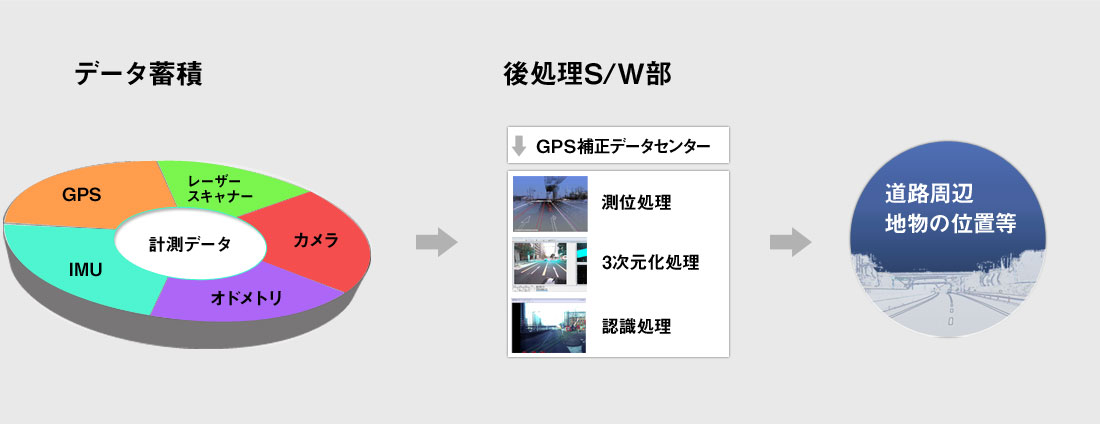
三菱電機株式会社が開発した車載型による移動式高精度3次元計測システム「モービルマッピングシステム」(MMS)です。GPS、レーザースキャナーカメラなどの機器を車両に搭載し、走行しながら建物・道路の形状・標識・ガードレール・路面文字・マンホール等の道路周辺の3次元位置情報を高精度で効率的に取得することができます。
三菱モービルマッピングシステム(MMS)は、3台のGPS、IMU、オドメーターにより車両位置・姿勢を高精度に取得。その上で同期したレーザースキャナー、カメラを搭載し、走行しながら道路面と道路周辺の3次元情報を高精度で効率的に取得出来るシステムです。
点群・画像の重畳(MMS取得点群・カメラ取得画像)
車両自己位置を元に、点群1点1点が高精度な位置情報を持っています。標準レーザーの点間ピッチは横断方向で8cm、縦断方向では時速60kmで20cm程度(K320は時速60kmで15cm程度)となります。
各500万画素(最大6台搭載可能)、撮影間隔は10枚/秒もしくは距離指定広い視野角(水平方向80度、垂直方向64度)高精細カメラを車両前後左右最大6台まで配置して全周囲の撮影が可能です。
レーザースキャナとカメラの設置角度は厳密なキャリブレーションにより調整されており、レーザー点群とカメラ画像をぴったりと重ね合うようにして計測を行います。これにより、レーザー点群の視覚的な弱点を補い、効率的な図化を可能にします。
絶対精度10cm以内の3次元位置計測が可能
GPSアンテナ、IMU、カメラ、標準レーザを一体化したユニットを天板上に装備。GPS可視区間で地上基準点(GCP)がなくても、道路面と道路脇周図7m以内を絶対精度10cm以内、相対精度1cm以内で計測可能です。
長距離高密度レーザー搭載のMMS-X320Rは同じ条件下で周囲80m以内を絶対精度10cm以内で計測できます。
全周囲カメラの連接搭載が可能
全周囲カメラLadybugを搭載することで、全周囲画像取得も可能です。MMS既設機器と完全に連動し、車両自己位置と精密に連動します。
アイサンテクノロジー モービルマッピングシステム MMS-X320Rによるサンプル動画
詳細につきましてはアイサンテクノロジーの紹介ページをご覧ください。
i-Constructionの点群計測に最適!小型・軽量ボディに高密度点群収集能力を搭載
地理空間データ収集の効率化を図り、高密度で広範囲な3D点群データを取得


●設置もラクラク!超小型・軽量設計
● 高速・高密度な点群データを取得!
●キャリングケースで手軽に運べセキュリティを確保
●図化業務やGIS データ更新に最適
●業界初! 観測直後にデータを確認できる
●プレイバック機能搭載
詳細につきましては、TOPCONモバイルマッピングシステムIP-S3 HD1をご覧ください。