
▲取材当日は、iPadでviDocを使用した。
端末間はBluetoothで接続する。
功研ジオシステムサービスの山下氏(右)に解説いただく。
2023年3月8日(水)に、Pix4D社「viDoc RTK rover(ブイドックアールティーケーローバー)」の製品体験を
神戸清光小野トレーニングセンター(兵庫県小野市)で行った。
本記事では、その様子をみなさまにお伝えする。
是非、製品導入イメージを深めていただきたい。
神戸清光営業担当者が体験したのは、携帯端末の背面に装着して使用する「viDoc RTK rover」と、
スマートフォンで撮影したデータにSfM処理を行うための無料撮影アプリ「PIX4D catch」である。
また、今回の製品体験に際し、Pix4D社プレミアムリセーラーの株式会社イメージワンより機材の御提供、
ならびに巧研ジオシステムサービスの山下氏に協力をいただいた。
「ドローン、レーザードローン、地上型レーザースキャナなど、使えるもの何でも使っていますよ。」と話す山下氏は点群のプロである。
同氏より、本製品を使った計測からデータ処理までの1つの流れを見せていただく。
「“徒歩計測”が出来る」ということから、補完的な役割での運用が期待される本製品について、
神戸清光営業担当者はどのように見たのだろうか?
▲取材当日は、iPadでviDocを使用した。
端末間はBluetoothで接続する。
功研ジオシステムサービスの山下氏(右)に解説いただく。
本記事でご紹介する「viDoc」で掲げられるのが、“徒歩計測”という概念だ。
ドローンや地上型レーザースキャナでの計測が普及しているが、それぞれの計測方法にはデメリットもある。例えば、ドローンであれば事前に飛行計画を立てなければならない準備の部分や、地上型レーザースキャナでは、入り組んだ場所での器械点の設置が難しい場合があることが挙げられるだろう。
viDocでは、スマートフォンを使用して写真測量を行う。本体を持って対象物にカメラを向けて歩くという計測方法のシンプルな動作が、大きな魅力だ。
特別な事前準備や器械点への考慮等が不要であるため、気軽な計測が可能である。
また、地上撮影により高解像度な画像を使用出来るため、点群密度も安定して高くなることも特長だろう。
ハンディタイプのレーザースキャナと通ずる部分もあるが、導入しにくい価格設定である場合が多いのがハンディタイプ導入へのハードルの1つである。
viDocでは、その数分の一という価格設定がされているため、そのハードルは取り除かれていると言えるだろう。
――3次元計測の普及に伴って、その計測ツールは多様化を見せている。
神戸清光のベテラン営業担当者たちが提唱しているのが、“複数の3次元計測ツール”の併用だ。
例えば、「レーザードローン×地上型レーザースキャナ」の組み合わせで、
それぞれのデータで点群が不足している箇所を補い合うことにより、更に再現度の高い成果物の作成が見込まれる。
viDocでは、そのデータを補う“補完”という役割での運用も可能だ。
「レーザードローン×viDoc」や「地上型レーザースキャナ×viDoc」というように、3次元データ取得ツールの選択肢の1つとなり得る。
「徒歩計測」の利便性と、「補完」の役割をもつ本製品。
その魅力を感じてみよう。

▲ドローンや地上型レーザースキャナでも計測しにくい所でも、
“徒歩計測”の「viDoc」なら計測しやすい。
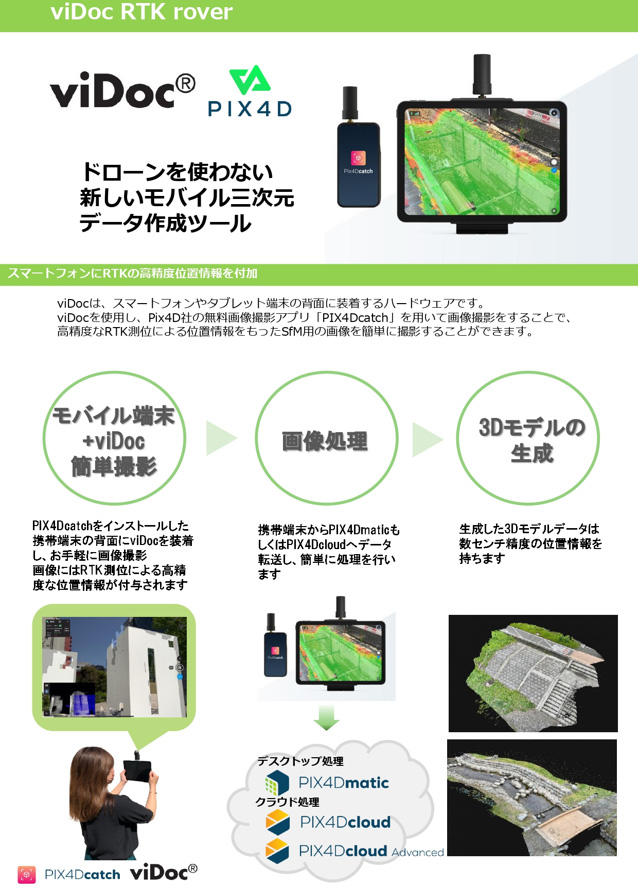
「viDoc RTK rover」は携帯端末の背面に装着するハードウェアだ。
iPad/iPhoneに対応している。(※使用端末によって、精度や作成可能データに制限あり)
本製品と携帯端末が同期され、任意のNTRIPサービス*に接続している間、リアルタイムにRTK精度で画像にジオタグが付けられる。
つまり、高精度のRTK測位による位置情報をもったSfM**用の画像を撮影することが可能なのだ。
――本製品で推奨したい活用方法は、iPad/iPhoneに搭載されているLidar機能と、
viDoc本体から取得されるSfM**の点群を組み合わせることによってデータ作成を行うこと。
これによって、高精度な位置情報を持つ高品質なデータが取得出来る。
また、携帯端末用・タブレット用と2パターンで本体が展開されており、ユーザーの運用背景に合わせて選択が出来るようになっているのも本製品の特長の1つだ。
今回取材に協力いただいた巧研ジオシステムサービスの山下氏は「表示画面の大きいiPadの方が状況を把握しやすく、現場ではより使いやすいと感じます。」と話した。
viDocのバッテリーの稼働時間は4~5時間と、現場で円滑に運用が進む仕様も魅力である。
下記のリンクからデモデータも確認出来るので、是非参考にしていただきたい。
(Pix4D社のHPに移動します。)
*NTRIPサービス…インターネット回線を通じてGNSSの補正データが配信される通信方式。
**SfM(Structure from Motion)…対象を撮影した複数枚の写真からそれらの位置を推定し、対象物の3次元モデルを生成する技術。

▲GNSSアンテナを装着した状態の「viDoc RTK rover」の本体1
取材時に体験したのは、iPadでのスキャニング。

▲GNSSアンテナを装着した状態の「viDoc RTK rover」の本体2
viDoc(タブレット用)+GNSSアンテナで約500gの重量。
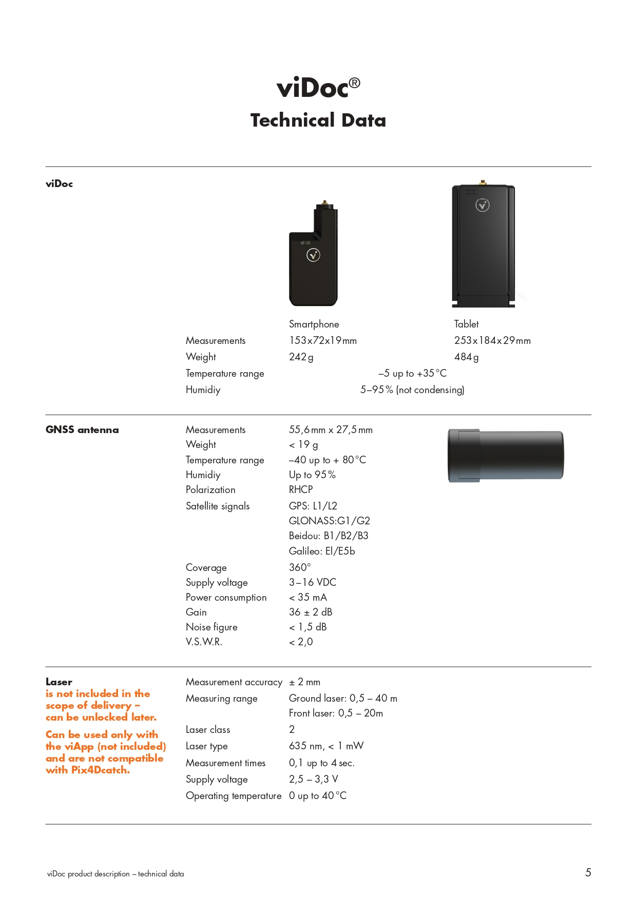
▲「viDoc RTK rover」のスペック概要。
viDocの運用には、無料撮影アプリケーション「PIX4Dcatch(ピックスフォーディーキャッチ)」も必要だ。
アプリはApp StoreおよびGooglePlay*からから簡単にインストール出来る。
PIX4Dcatchでの画像取得は、RTKローバーからのGNSSデータの記録とは別に行われる。
撮影が完了してプロジェクトが保存されると、画像のタイムスタンプに基づいて、ローバーからの地理位置情報が対応する画像にタグ付けされる流れだ。
また、撮影後の点群データもアプリケーション上で確認ができ、撮影時の軌跡も表示される。
1回の撮影時の写真枚数上限は4000枚だが、処理の安定性や発熱の影響をを考えると1000枚程度で行うことがベターだという。撮影設定時にはラップ率を調整し、それに対して自動でシャッターが切られる構造だ。
下記の砂山のデータの計測時間は約2分。
ラップ率は90%で撮影枚数は562枚。データ容量は900MBとなった。
青く表示されているのが、撮影時の軌跡だ。
計測時の印象としては、「砂山の周りを2周ほどグルグル回った」という感じである。
viDocに端末を装着し、アプリケーションを立ち上げるとすぐに撮影が可能なため、準備・実測共に、とにかくスピーディーに終わる印象が強かった。
地上型レーザースキャナを据える手間や、ハンディタイプのレーザースキャナの導入コストのハードルの高さを考慮すると、
viDocは、導入イメージの湧きやすい製品だと言えるだろう。
位置情報が必要なければ、PIX4Dcatch のアプリだけでも撮影が可能だ。
無料でダウンロード出来るので、是非一度、みなさんも体験していただきたい。
*viDoc本体は基本的にApple製品が対象。無料アプリケーション「PIX4Dcatch」はApple/Androidの両対応。
「PIX4Dcatch」の製品情報はこちらから。
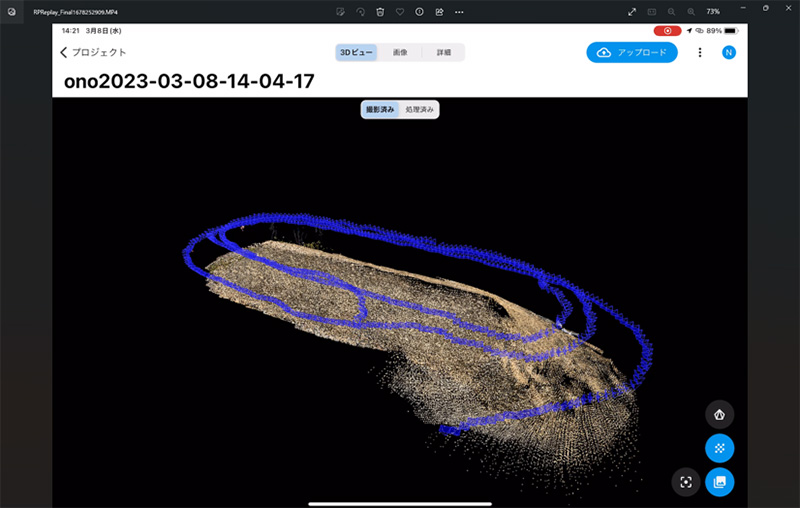
▲PIX4Dcatchの実際の画面。
青色は、計測時の軌跡。
「PIX4Dcatch」によるデモプロジェクト(発掘現場)
「PIX4Dcatch」によるデモプロジェクト(土の山の体積計算)
「PIX4Dcatch」によるデモプロジェクト(地下設備のマッピング)
取材当日は、viDocで取得したデータの処理を「PIX4Dmatic(ピックスフォーディマティック)」で行った。
本製品は、正確な写真測量処理用に最適化されたというソフトウェアだ。
点群処理はもちろんのこと、オルソモザイク・DSM(数値表層モデル)・メッシュを作成することが可能な本製品。機能の豊かさももちろんなのだが、ソフト上での処理完了までのフローが分かりやすいことも面白かった。
アプリケーション「PIX4Dcatch」で計測したデータをUSBで転送し、本ソフトウェアで処理するのだが、
その際に深度/レポート/DSM/オルソの作成の有無をチェックするだけで、ほぼ半自動で処理が開始される。
Pix4D社のホームページから無料トライアルの登録も出来るので、
興味がある方はこちらも是非体験していただきたい。
「PIX4Dmatic」の製品情報はこちらから。
「PIX4Dmatic」の製品トライアルはこちらから。
「PIX4Dmatic」の機能一覧はこちらから。(PDF)
「PIX4Dmapper と PIX4Dmatic の比較」はこちらから。

▲「PIX4Dmatic」の製品イメージ。
viDocでは、点群取得だけでなく座標取得も出来る。
「シングルポイント計測機能」では、viDocと一脚を使用し、GNSS測量機と同様に指定位置の公共座標を計測することが可能だ。
照射されるレーザーポイントで対象点に合わせて、画面の電子水平儀で15秒間水平を保つだけの手順で完了する。
Pix4D社製品の日本代理店である株式会社イメージワンの精度検証では、
本シングルポイント計測機能での計測値と、国土地理発行の公共測量座標の比較を計5所の基準点で行い、XYZ較差4㎝以内という結果が出たという。
超簡易的にGNSS測量のようなイメージで計測が出来るのも、本製品の面白さの1つだ。

▲viDocでの座標取得の様子。
ここからは、実際の計測データを見てみよう。
福井コンピュータ社3D点群処理システム「TREND-POINT」を使用して、「viDoc」と「BLK360 G2」のデータを比較する。法面のデータ比較では、両データの差は5㎝程度に納まっていることが分かる。
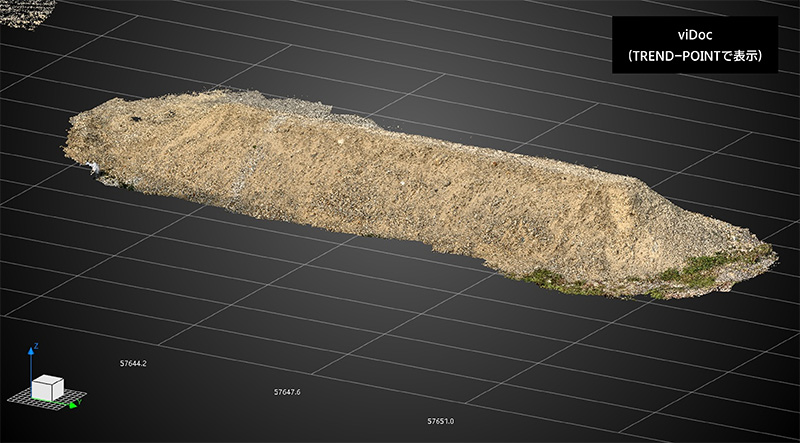
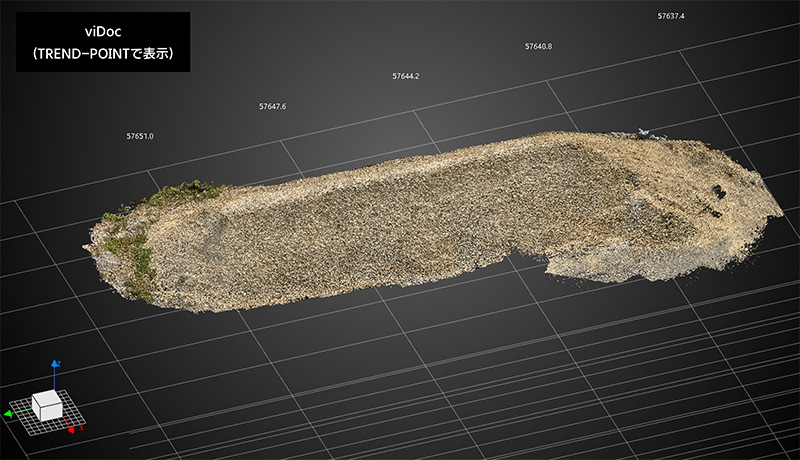
また、viDocのみで計測した車体のデータを見てみると、細かなエッジ部分の再現率の高さにも驚かされる。
計測を実際に体験し、データまで確認した神戸清光営業担当者は「補完として“使える”製品ちゃうかな。」と話した。
▲viDocで計測した法面のデータ1
▲viDocで計測した法面のデータ2

▲BLK360 G2で計測した法面のデータ1
※viDocとは別日で計測したため、天候の条件に差異あり。

▲BLK360 G2で計測した法面のデータ2
※viDocとは別日で計測したため、天候の条件に差異あり。

▲「viDoc」+ 「BLK360 G2」で計測した法面のデータ1
大きなズレは感じられない。

▲「viDoc」+ 「BLK360 G2」で計測した法面のデータ2
アングルを変えても、しっかり重なっているように見える。
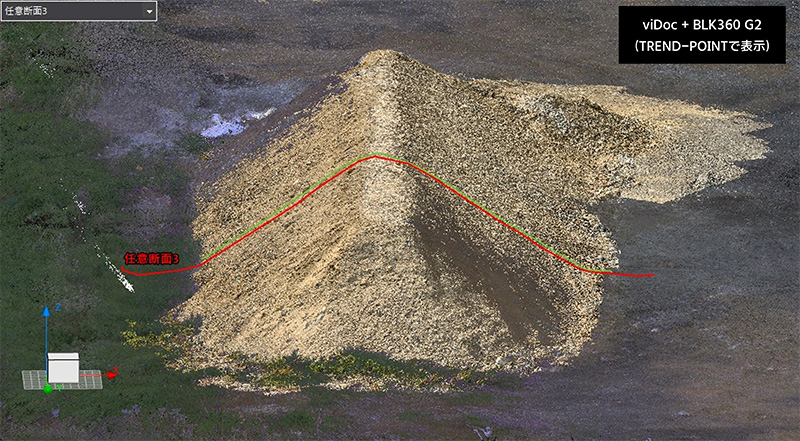
▲「viDoc」+ 「BLK360 G2」で計測したデータの断面比較。
黄緑=viDoc 赤=BLK360 G2
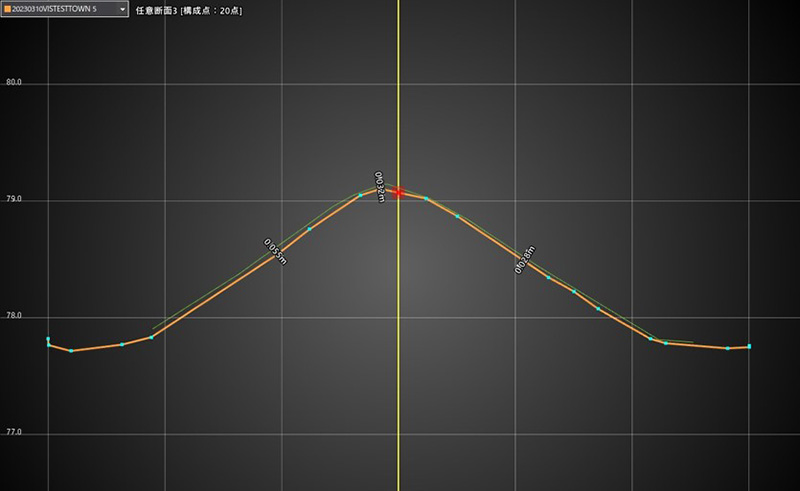
▲「viDoc」+「BLK360 G2」で計測したデータの断面比較1
(黄緑=viDoc)
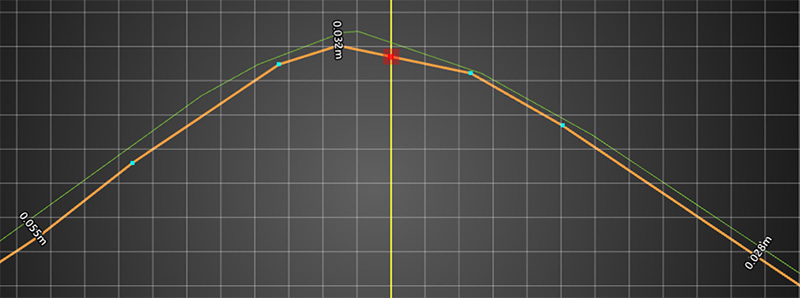
▲「viDoc」+「BLK360 G2」で計測したデータの断面比較1の拡大。
(黄緑=viDoc)

▲viDocで計測した車体のデータ。
神戸清光営業担当者は「しっかりエッジが再現されている」と評した。

▲viDocで計測した車体のデータ。
――どの製品にも長所と短所はあるが、本製品ではどうだろうか?
【長所】
1.携帯端末を利用して、お手軽に計測が可能
2.ソフトウェア処理も半自動
3.RTK測位によるcm級の精度
4.SfM処理による高密度な点群と高精細なメッシュ作成
5.シングルポイント計測により任意の位置の座標値を取得可能
【短所】
1.RTK測位が前提となっているため、衛星信号が受信できない/しづらい環境では精度が低下する。
こういったことが、長所と短所でそれぞれ挙げることが出来るだろう。
viDocは、計測の手間がかなり軽減されているイメージの製品であった。

▲viDoc本体を横から。

▲座標取得以外でも、一脚を使っての計測は安定感があって良いとのこと。

▲viDocの専用ケース。
功研ジオシステムサービスの山下氏は、「viDocは、撮影者の意図が反映されやすいと感じます」と話す。
――レーザードローンも地上型レーザースキャナも、レーザーが照射されているところが点群化される。
つまり、本体から「見えているだろうな」という部分が点群化されるということだ。
viDocは撮影者の動作によってデータの構築が行われるため、多少入り組んだ場所でも安定して高密度な点群を生成することが出来る。
また、ラップ率の調整も簡単なため、撮影者の本当に“欲しい部分”が計測段階から反映することが可能である。

▲神戸清光営業担当者もviDocについて、興味が深まっている様子だった。

▲功研ジオシステムサービスの山下氏の解説は、とてもロジカルで面白かった。
▲「viDoc」の製品概要。
viDocによって、スマートフォンでの点群取得の測量への活用が進む気がした。
筆者個人的にはスマートフォンでの点群取得は“写真の延長”“思い出を3次元で残す”というイメージが強かったが、Lidar技術とSfM技術の融合によって、測量へ展開されることが出来るのだと驚いたのが、正直なところだ。
実機を見てみないと分からないんだなあ、ということを毎度ではあるが感じた。
神戸清光営業担当者たちが大切にしている「実機を見る」に、共感出来る。
何か課題や目的・ゴールに向けて動き始めたい気持ちがある方、神戸清光にお気軽に連絡ください。是非一緒に解決しましょう。
(株)神戸清光 広報チーム
<本記事の取材協力>
功研ジオシステムサービス 様【所在地】〒654-0073 神戸市須磨区関守町2-2-18
【ホームページ】https://www.kkgss2019.com/
機材協力:株式会社イメージワン 様
【所在地】〒141-0032 東京都品川区大崎1-6-3 大崎ニューシティ3号館6F
【ホームページ】https://www.imageone.co.jp/