
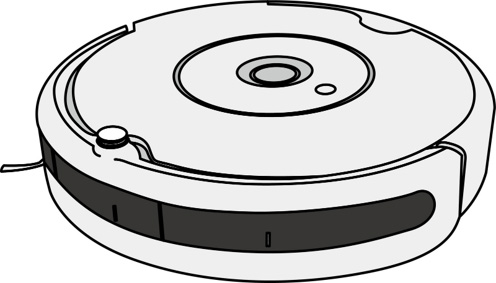
▲BLK360 G2の場合、「VIS」はこの4点のカメラで行われる。
読者のみなさんは、ライカ社独自のアルゴリズム「VIS(ビス)」という機能をご存知だろうか?
同社が提供するレーザースキャナ「RTC360」「BLK360 G2」に搭載されている本機能は、自己位置を認識しながらスキャニングを行うことを実現する。
スキャニング中の器械点の移動を機体が認識し、自動合成の成功率と精度を上げることが出来るだろう。
メーカーの独りよがりなガラパゴス機能ではなく、実用性があり製品の価値を上げていることがしっかりと感じられる技術だ。
本記事では、神戸清光営業担当者がVIS機能をいかに効率よく使用することが出来るのかを「BLK360 G2」で検証した様子をお伝えする。
暫定的な結論ではあるが、現場の特徴で左右されるものではなく、次の器械点への動き方が肝になると考えられる。
▲BLK360 G2の場合、「VIS」はこの4点のカメラで行われる。
まずは、VISについての理解を深めよう。
「Visual Inertial System(ビジュアルイナーシャルシステム)」の頭文字を取って表記されているのが、「VIS(ビス)」である。
本技術を一言で表現するのであれば、「自己位置が分かる」がイメージしやすい。
計測時に、本体とアプリケーション「Cyclone FIELD360」をWiFi接続することで画面上に、機体の位置が表示される。
是非、下記の動画をご覧いただきたい。
ベースとなるのは、Visual Slam(ビジュアルスラム)。
カメラから得られた映像データで、自分の位置や周辺のモノの位置を3次元で把握する技術だ。
難しいように感じるかもしれないが、一部のお掃除ロボットや自動運転車両にも使用されている技術で、実は私たちの生活に馴染みつつある。
それをさらにライカ社が改良したのが、VISという技術だ。
――しかし、その技術の搭載がユーザーの何に役立つのだろうか?
答えの1つは、「内業の短縮」だろう。
RTC360を使った「VIS」の解説動画(全編英語です。)
▲一部のお掃除ロボットにも、ビジュアルスラムが使用されている。
言葉が難しいので構えてしまいそうになるが、実は私たちの生活にスラム技術が馴染んでいることが分かる。
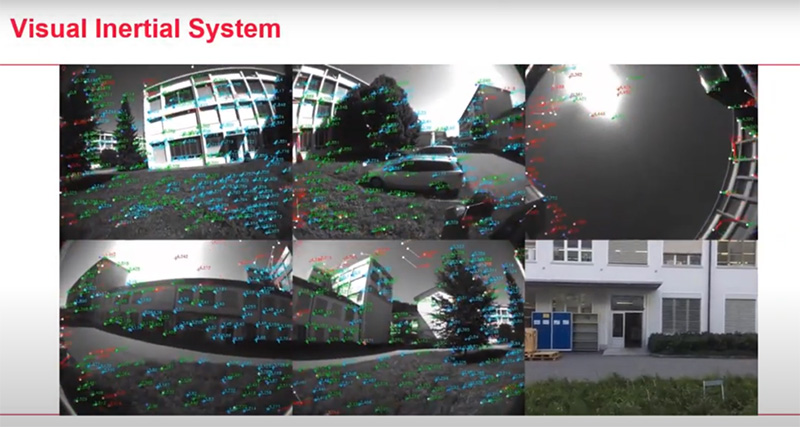
▲VIS機能で使われるアルゴリズムのイメージ。(RTC360のカメラ例)
(Leica Geosystems US&Canada on Youtube「The power of VIS」より抜粋)
VIS(ビス)は一体、何に有用なのだろうか?
その1つが、内業の短縮だろう。
――地上型レーザースキャナでの計測は、現場でスキャニング→事務所で合成処理という流れが一般的である。
計測してきた点群データの合成には時間が掛かる、ということは仕方ないと思われることも多かっただろう。また、データを事務所で見てみないと分からない状況から、計測のし忘れをリカバーするための時間が必要だった場合もあったかもしれない。
しかし、VIS機能によって現場での事前合成を現実的な運用フローで行うことが出来るようになった。
つまり、事務所に帰ってからの合成処理作業がかなり軽減されることが実現されたのだ。
本検証を実施した神戸清光営業担当も、PCに向かって「すごい、めっちゃ楽!」と叫んでいた。
ライカ社は製品開発時に、現場での事前合成を注力事項の1つとして捉えていたようだ。
レーザースキャナ使用時の、計測し忘れたポイントの見えにくさを解消することを目指したと考えられる。VIS機能が搭載されていない「BLK360 G1」でも、携帯端末のアプリケーション「Cyclone FIELD360」上で事前合成は可能であった。
しかし正直な使用感としては、アプリケーションへの点群データ転送スピードを含めた全体の計測時間を鑑みるとアプリケーションの使用は必須でない場合がある。
アプリケーション上でのデータ確認を行う時間があるなら、それを使用せずにその分スキャニング回数を増やした方が良いかもしれないという見解を示す神戸清光営業担当もいた。
筆者個人的にも、BLK360 G1においてのアプリケーションの立ち位置は、直接スキャニングのスタートボタンを押しにくい場合に遠隔で操作するために使うと便利というイメージだ。
――今回検証を行った、2022年8月日本リリースとなった「BLK360 G2」では、新たにVIS機能の追加が大きな特長となった。今までは、上位機種である「RTC360」のみに搭載されていたVIS機能。それがBLK360でも使用できることは非常にワクワク出来るニュースだった。
BLK360の本体にはディスプレイがないため、自己位置の可視化のためにアプリケーションの使用が必須となる。
G1では少し長さを感じた点群データの転送時間を含めた計測時間は、G2の革新的な40秒/器械点*1 によって非常に円滑なものとなっている。
*1:計測時間は点群の密度設定・写真撮影有無によって変動します。
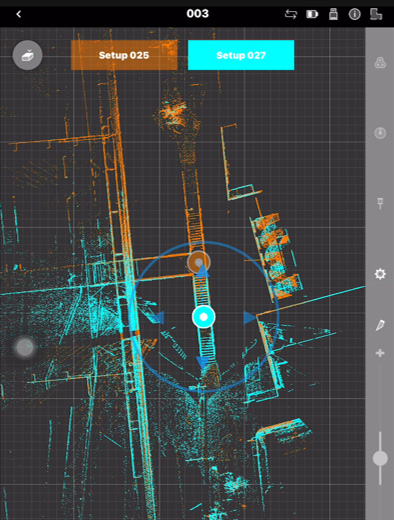
▲アプリケーション「Cyclone FIELD360」での合成時の画面。

▲点群処理ソフト「Cyclone REGISTER360」では、自動合成が適用されない場合に手動での合成が必要となる。
▲手動合成の手順はシンプルだが、おおよその位置関係が分かっていないと合成作業が難しい場合もある。 (写真はCyclone REGISTER360での手動合成時の画面。)
VISの有用性を感じていただけたところで、今回の検証の様子も見てみよう。
テーマは、「VISを利かせるコツ」だ。
ご紹介してきたVIS機能だが、稀に途切れたり、自己位置がずれてしまう場合がある。
その成功率をより上げるために、下記の検証を行った。
1.現場の特徴の差による検証
2.器械点移動の際の本体の動かし方による差の検証
1器械点あたりの計測時間がかなり短縮されたBLK360 G2だが、
VIS機能も併せて活用することで、是非作業効率を飛躍的なアップを目指すことが出来るだろう。

▲VIS機能があれば、階層になっている現場の合成も難しくない。
まずは、“現場によって自己位置把握が左右される”という仮説を考えてみる。
以下の3現場で現場の特徴差による比較を行った。
1.構造物に囲まれた市街地
2.高架下
3.構造物のない郊外
これらの現場で、VIS機能の適用され方を比較する。
事前の予想としては、特徴点の多い現場の方が自己位置の把握に有利というところだろうか。
構造物に囲まれた市街地での計測時では、VIS機能が途切れる事象が数回発生した。
事前の予想としては、構造物が特徴点となるためVIS機能の適用も問題ないと思われたが、また違う条件がありそうだ。
「この現場でこんな感じなのか…」と非常に意外な結論であった。
体感で恐縮だが、70点/100点という印象。
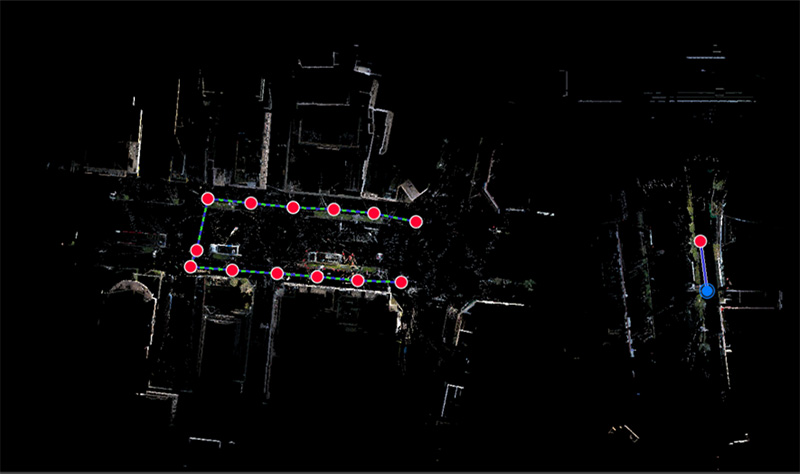
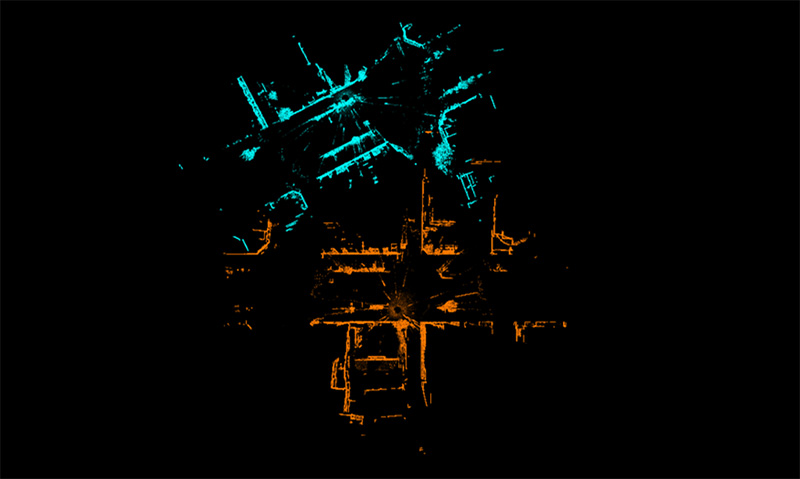
▲市街地データを俯瞰した画面。
一部、手動合成が必要な個所が見受けられた(画像右側の2器械点)。

▲市街地での計測データ。
特徴点となり得る構造物に囲まれる。

▲構造物に囲まれている市街地での計測時の様子。
高架下での自己位置認識はどうだろうか?
本現場の特徴は、上空が開けていないことと陸橋が重なっていること。
データが1階と2階で構成されるイメージだ。
構造物に囲まれてはいるものの、同一の特徴点が連続する印象である。結論としては、前述の現場との計測差は感じられなかった。
同じく、70点/100点という印象だ。
――やはり、VISが途切れる瞬間があったことから現場の特徴差で左右される仮説が薄くなる。
意外にも陸橋の階段を上る際には途切れることなく、広場部分での計測時にそれが発生したことが興味深い。
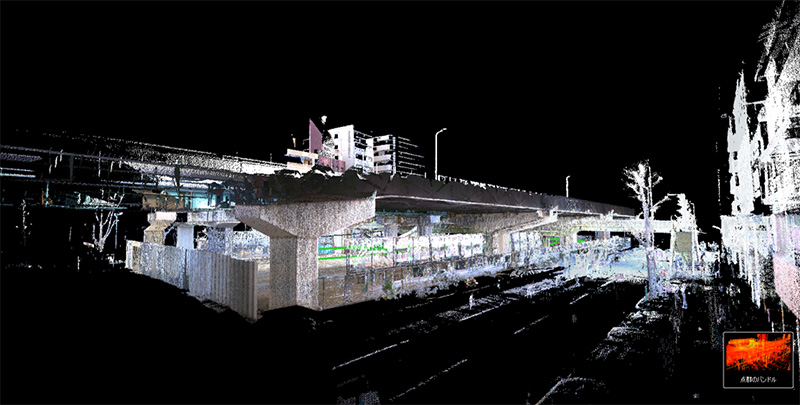
▲高架下データの全体。

▲上部までデータが取れている。

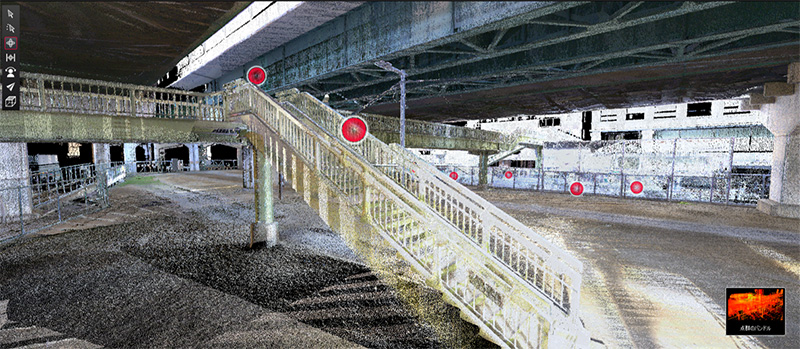
▲高架下での計測時。
上空が開けていなくても、VIS機能は影響を受けない。

▲この現場の特徴は、上空にも構造物があることと階層的であることだ。

▲階層的な現場計測のポイントは、両者を繋ぐ部分を漏らさずに計測しておくこと。
▲合成が完了したデータ。
高い再現率の印象だ。
最後は、構造物のない郊外にて計測を行った。
事前予想は、他2現場に比べてVISが適用されないか、というところ。
しかし結果は、一貫して適用されたことが分かった。
本現場は90点/100点という印象だ。

▲構造物のない郊外として、神戸清光小野トレーニングセンターで計測を実施する。
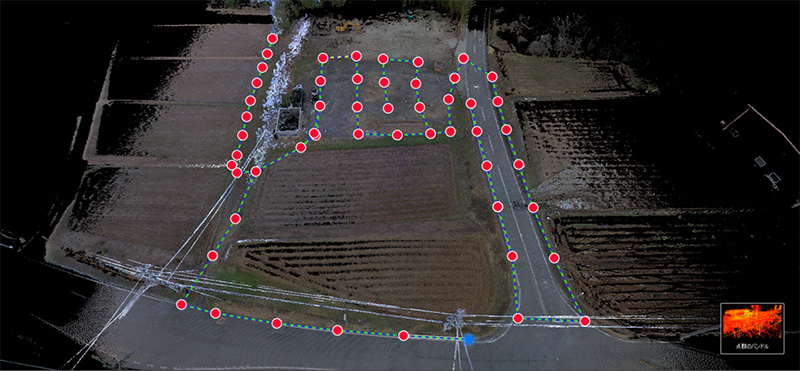
▲特徴点のない現場こそ、VIS機能で合成作業が助かる。

▲郊外の現場データ。
以上、現場によるVIS機能の適用され方を検証したが、
確定的な大きな発見はなかったように感じる。
本検証を実施した神戸清光営業担当は、「現場の環境や特徴点の多さでVISが効きやすいとは言い難い」と考えた。
3現場目の郊外での計測でVISの適用が途切れることなくされたのだが、実は計測した神戸清光営業担当者が意識したのは、BLK360本体の次器械点への持ち運び方だという。
VIS機能の適用が現場によってされる、という仮説を立証することは難しいことが分かった。
神戸清光営業担当が次に立てた仮説は「BLK360 G2」の移動のさせ方だ。
神戸清光ではBLK360 G1の計測時にデータのラップ率を上げるためにジグザグに計測を進めていくことを推奨していたが、同様の計測方法を行うとBLK360 G2ではVIS機能が途切れてしまう事象が起こった。
また、次の器械点へ動く際に進行方向へカメラを向けてから動き出すのも有効かと考え、試してみたが、
それもVIS機能が途切れることがあり、確固たる答えにはなり得なかった。
さらに次の器械点へBLK360 G2を動かすときに平行移動することをテストしてみると、
VIS機能が途切れることなく、一貫して有効となることとなった。
このことから、暫定的ではあるが、平行に器械点を移動させることが有効だと本検証では結論付ける。
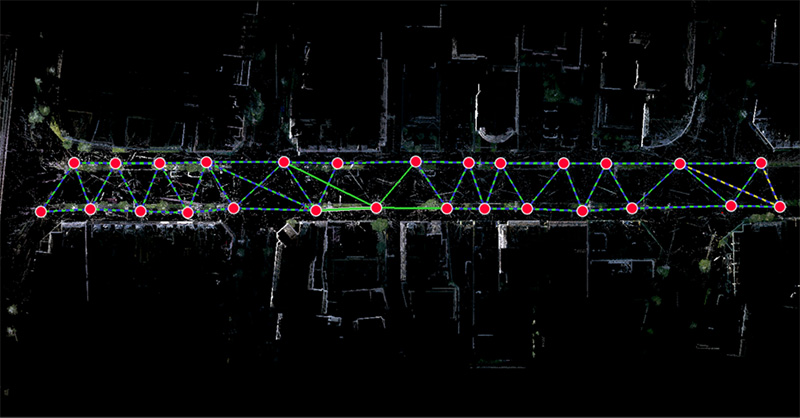
▲「BLK360 G1」での計測時には、データのラップ率を上げるためにジグザグに器械点を設定していくことを推奨していたが、「BLK360 G2」では、それを意識しなくても良い可能性が高い。
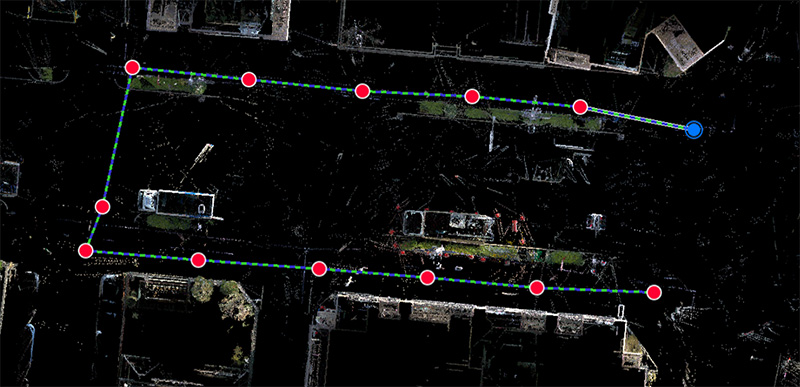
▲BLK360 G2では、平行に移動させていくことがポイントになることが考えられる。

▲本体の高さを上げて移動したり、三脚を高めに設置しても劇的な成功率とはならなかった。

▲カメラを進行方向に向けて、次の器械点へ移動することもテストしたが、
有効だとは感じられなかった。
BLK360 G2で追加されたVIS機能。
「計測しながら、合成も行う」ということがレーザースキャナでの計測の最終形態かもしれない。
本機能は「RTC360」と「BLK360 G2」にのみ搭載されており、
それらは神戸清光営業担当たちの製品提案の際にレーザースキャナ部門だと“まず提案する”製品たちでもある。
BLK360 G1の発売時には、それが革新だと感じられたが、計測時間や新機能の追加でユーザーたちは驚かされた。
本検証を担当した神戸清光営業担当者は「VIS、最高。無いなんて考えられない。デメリットは存在しない。」と言い切った。
彼は、複雑な地形での計測時こそ本機能を活用すべきとも考えているという。
“とりあえず付いています”的な機能ではなく、本当に使える機能であることが魅力だろう。
現場での悩み・課題があれば、神戸清光と一緒に解決しましょう。
是非、お気軽にご連絡ください。
(株)神戸清光 広報チーム