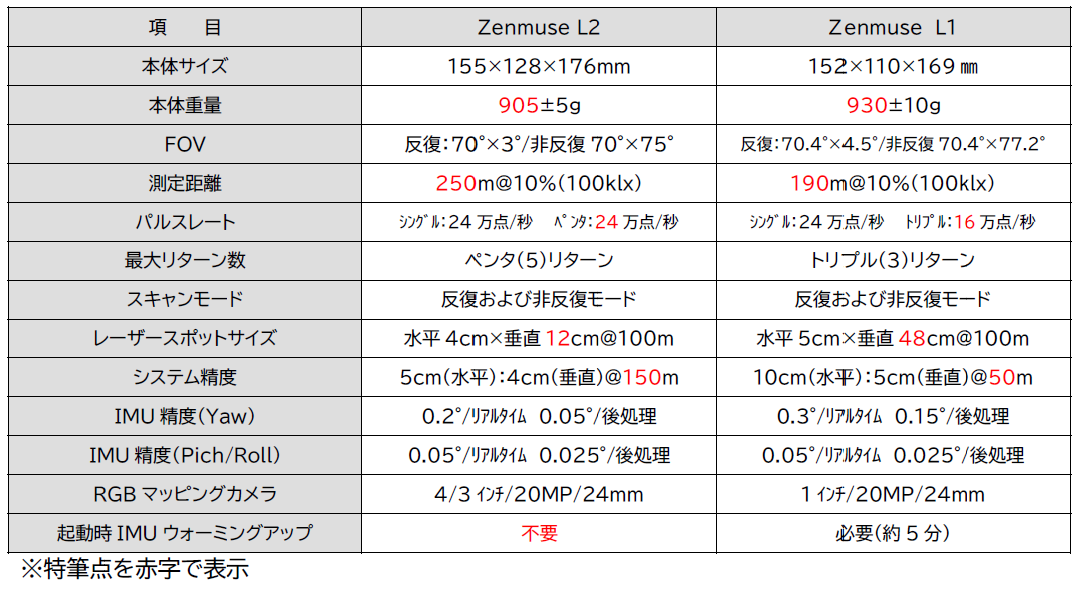
弊社にて実施した新型LiDARセンサー搭載ジンバル DJI 社Zenmuse L2の比較検証結果を報告する。
検証方法は、前モデルのZenmuse L1と同一ルートを同じ設定で計測した結果を比較し検証した。また同時にL2の反復・非反復モードでの計測結果の違いについても確認した。
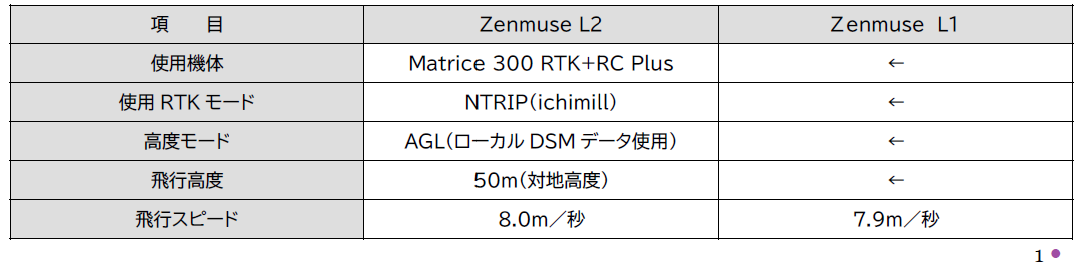
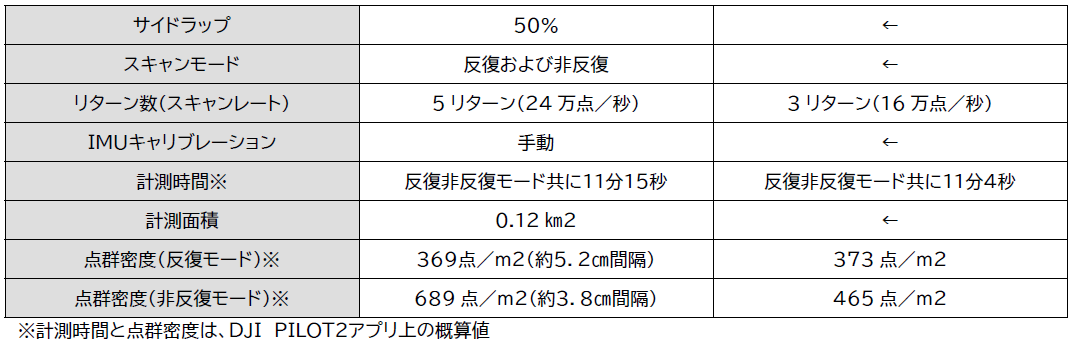
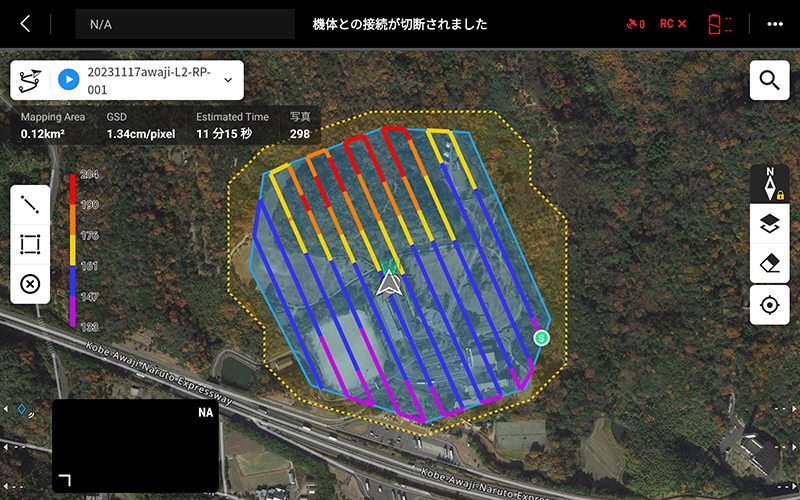
Fig.1 DJI PILOT2アプリ計測範囲
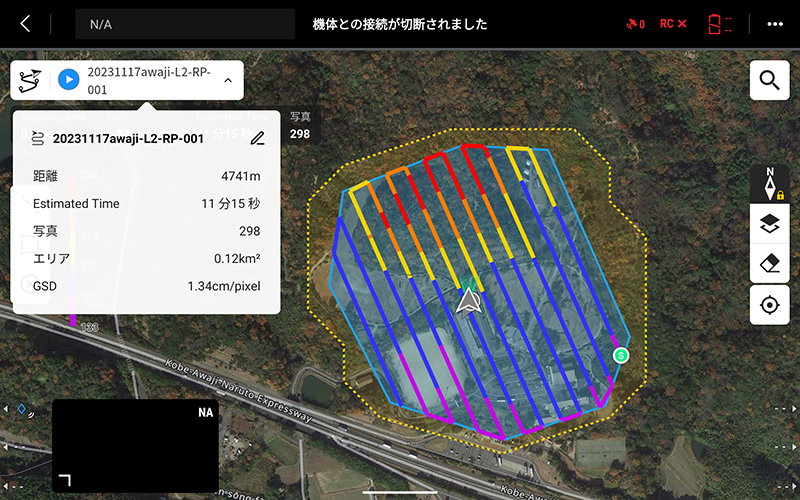
Fig.2 L2反復時のミッション詳細
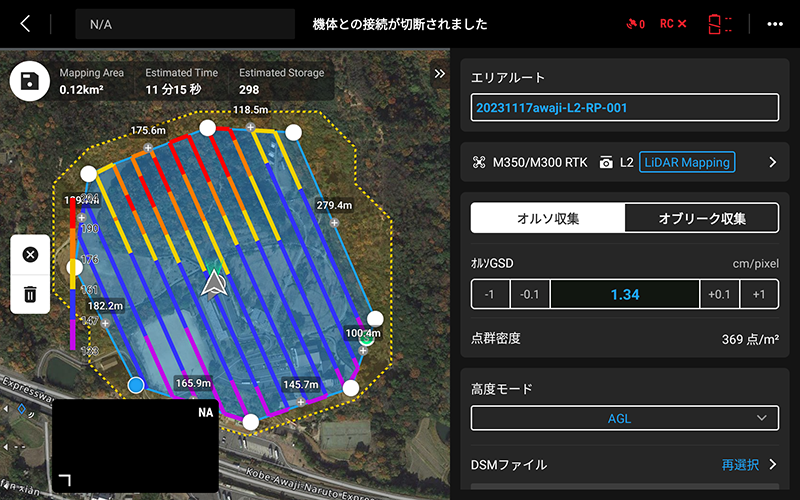
Fig.3 写真の地上解像度と点群密度
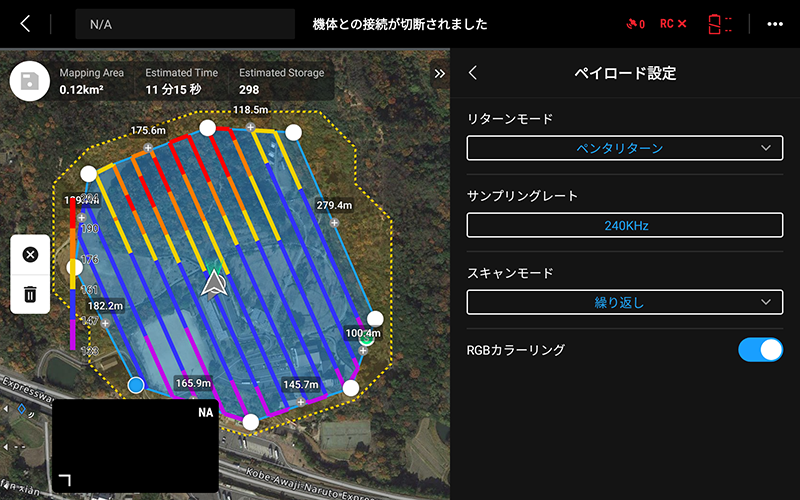
Fig.4 L2ペイロード設定
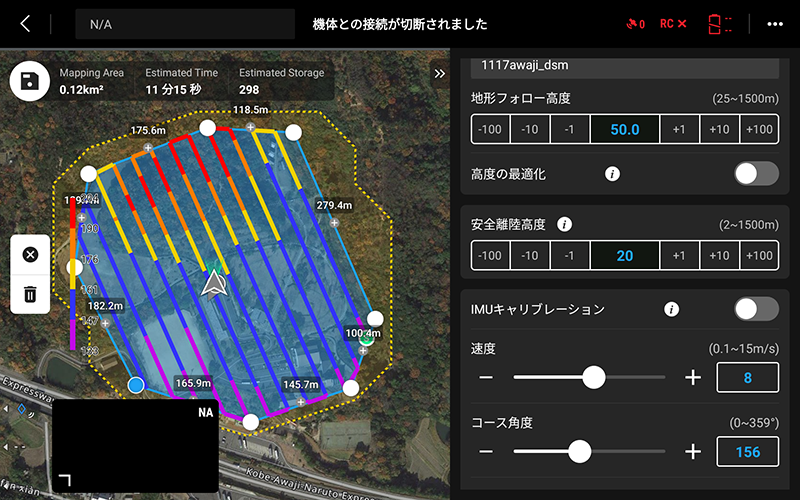
Fig.5 飛行高度と飛行速度など
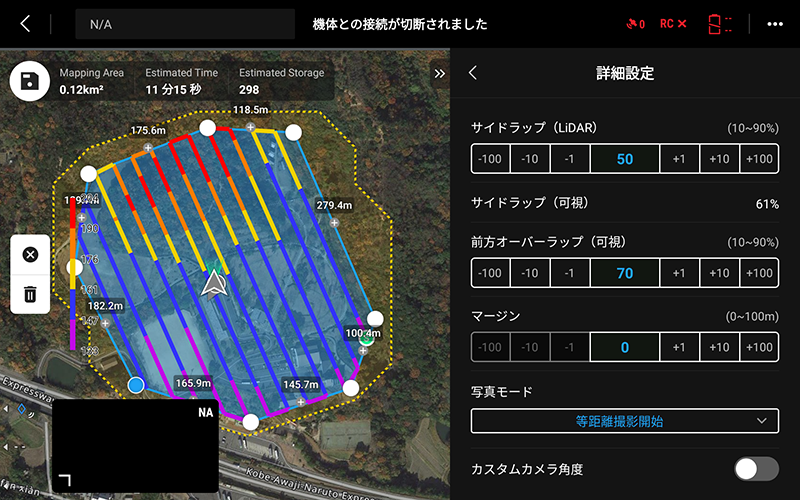
Fig.6 オーバーラップ(可視)およびサイドラップ
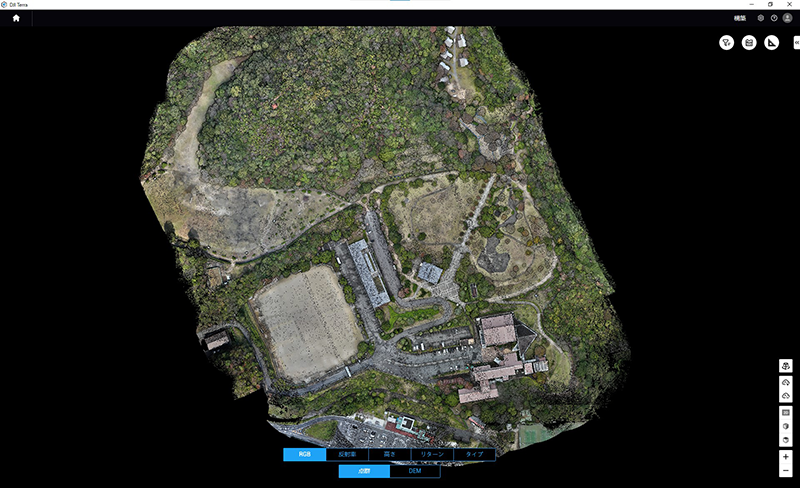
Fig.7 L2点群データ(RGB)カメラがグレードアップして更に高精細な色情報が自動的に取得される。
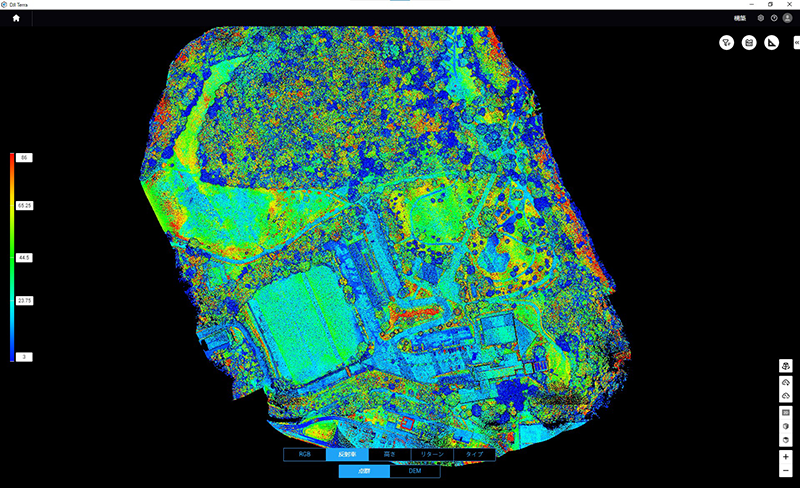
Fig.8 L2点群データ(反射強度)L1/L2共に反射強度の表示も非常に分かり易く特筆すべき点と思う。
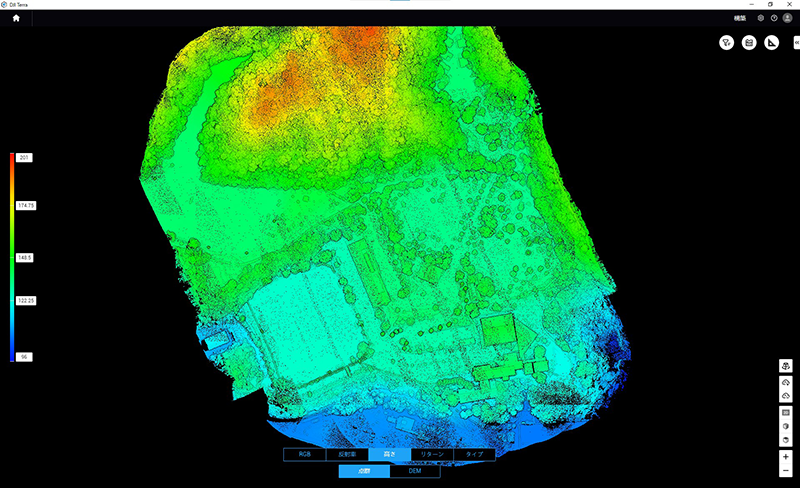
Fig.9 L2点群データ(高さ)
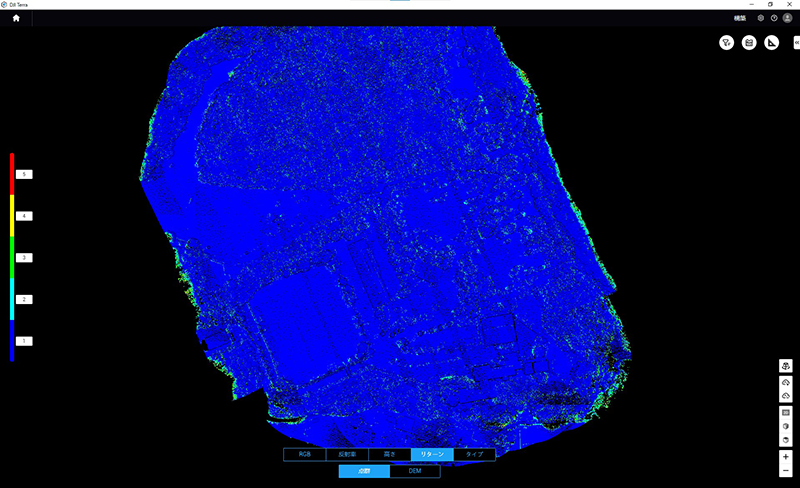
Fig.10 L2点群データ(リターン) ヘキサ=5リターンまで取得できるようになった。
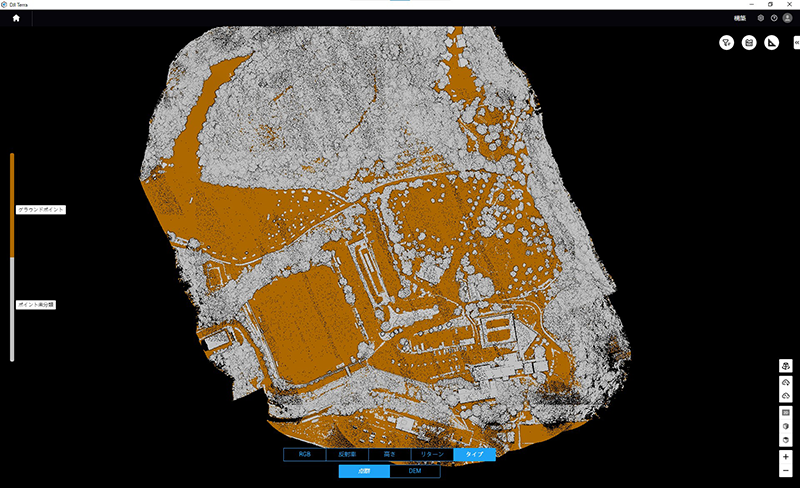
Fig.11 L2点群データ(タイプ/分類) DJI TERRAで地表面を抽出出来るようになっている。
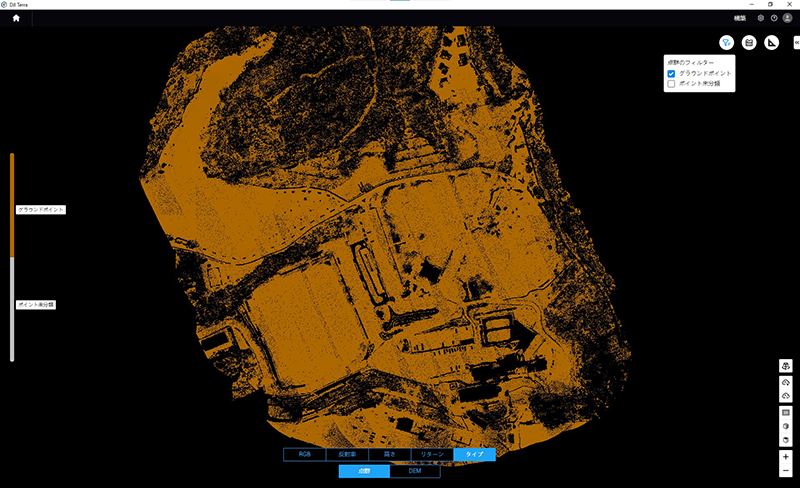
Fig.12 L2点群データ(タイプ/分類) 分類で地表面のみ表示したところ。
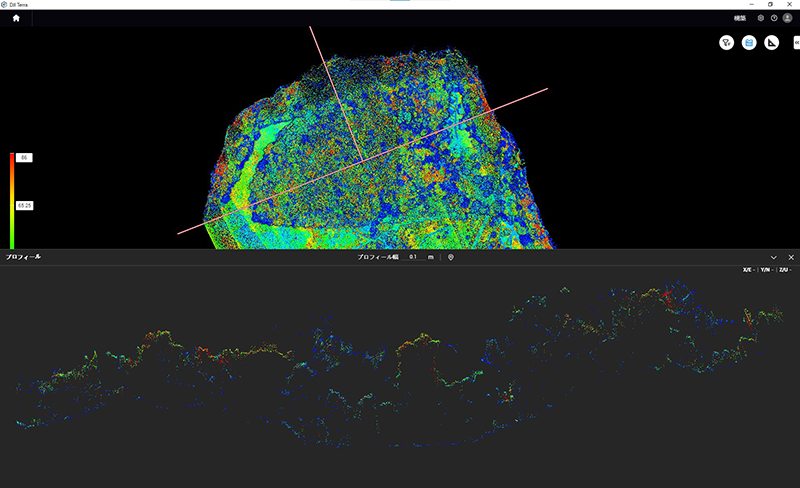
Fig.13 DJI TERRA最新版では任意場所の断面表示が出来るようになった。
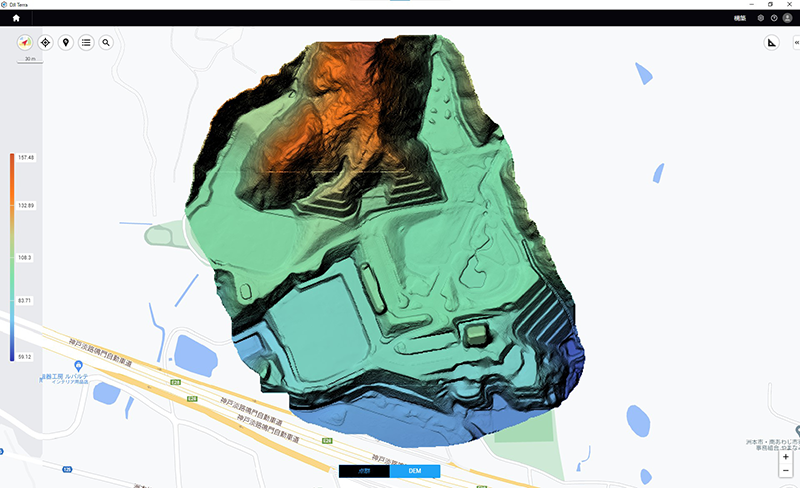
Fig.14 点群データから直接DEMデータの作成が可能となり、これを使った地形追従プランの作成も出来る。
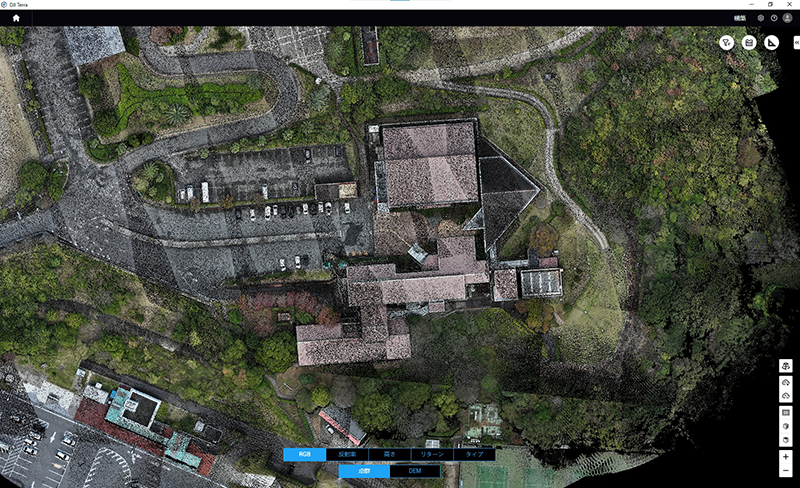
Fig.15 L2点群(RGB)表示の拡大1 自動でしかも高精細な画像が取得でき、位置ずれも一切見られない。
Fig.16 L2点群(RGB)表示の拡大2 自動でしかも高精細な画像が取得でき、位置ずれも一切見られない。
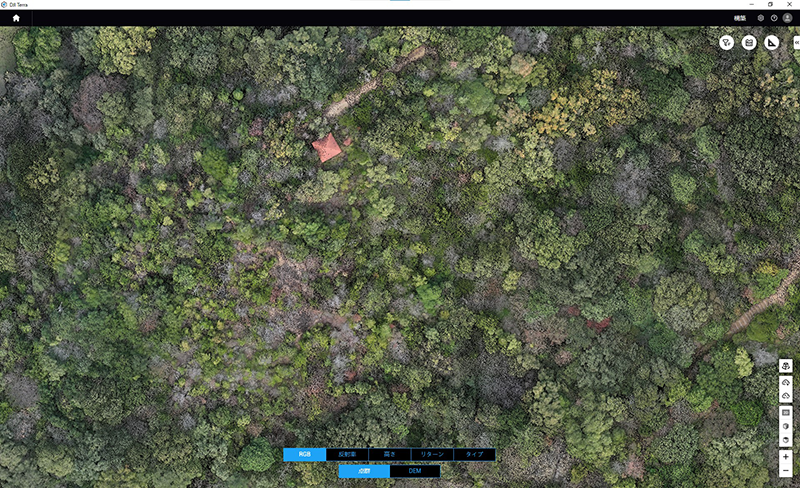
Fig.17 L2点群(RGB)表示の拡大3 初冬の森林1本1本に正確に色付されているのは本当に驚きだ。
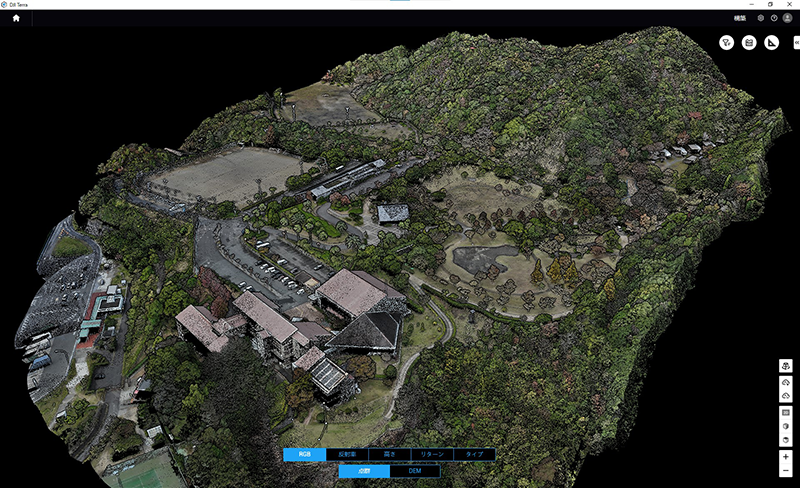
Fig.18 L2点群(RGB)表示の鳥瞰視点。
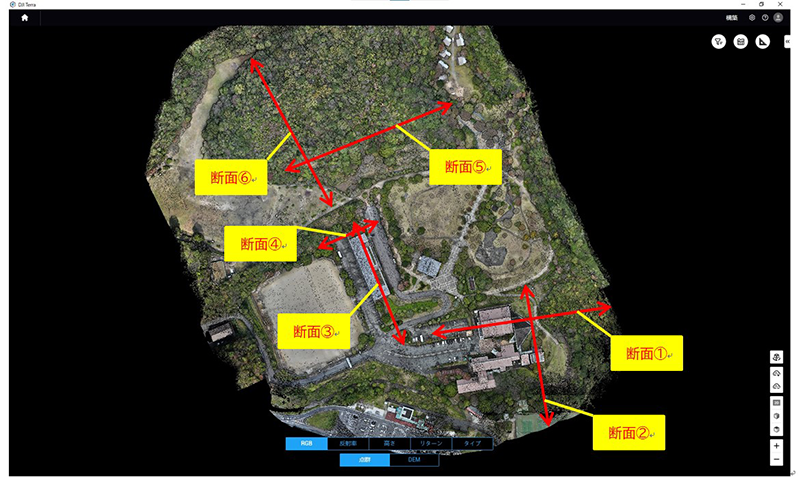
Fig.19 Zenmuse L2/L1点群データ比較用断面抽出位置(それぞれ反復モードのデータを使用)
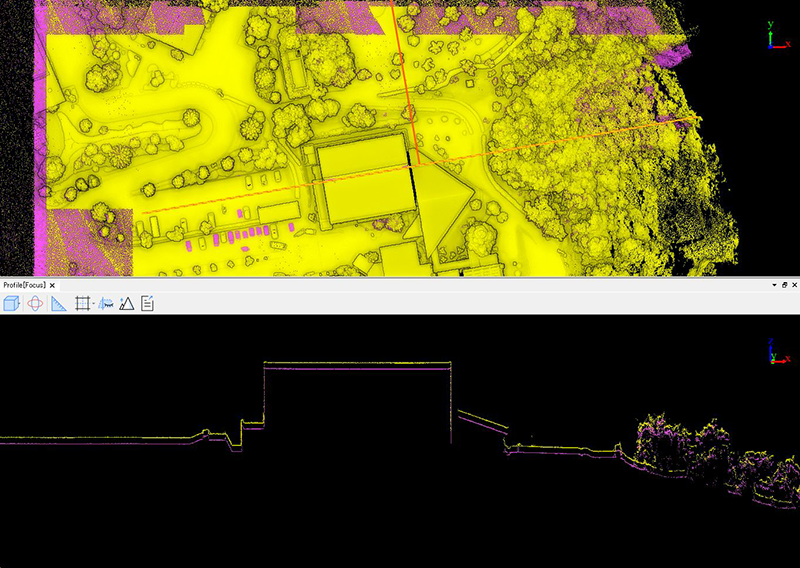
Fig.20 断面① 断面スライス幅=0.1m
ピンク=L2反復モード/イエロー=L1反復モード
(以下同じ)
※断面はL1データを1m高く表示している。
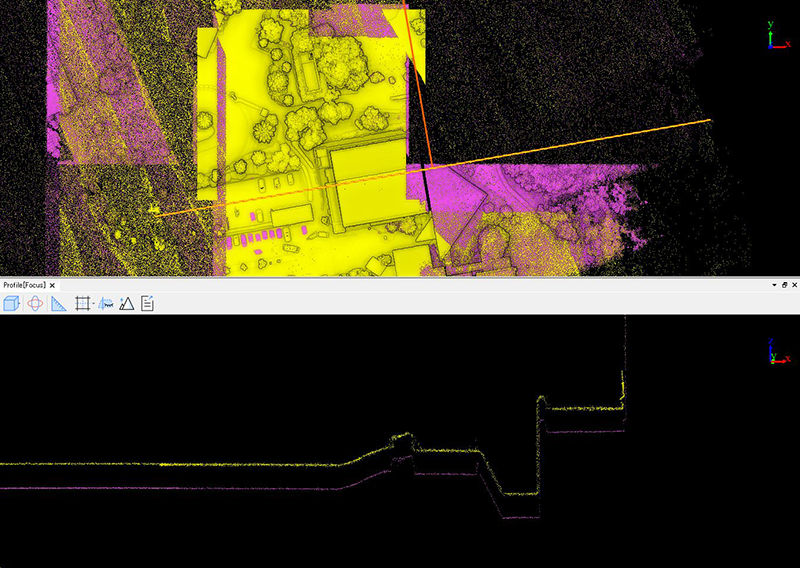
Fig.21 断面①拡大1
手すりや段差など詳細部においても特に大きな差は見られない。
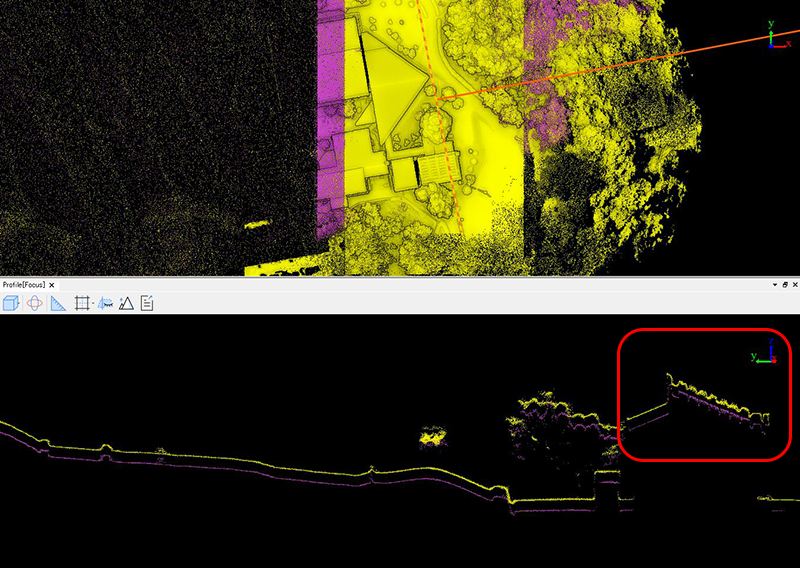
Fig.22 断面②
右側建物の屋根の形状が大きく異なっている。
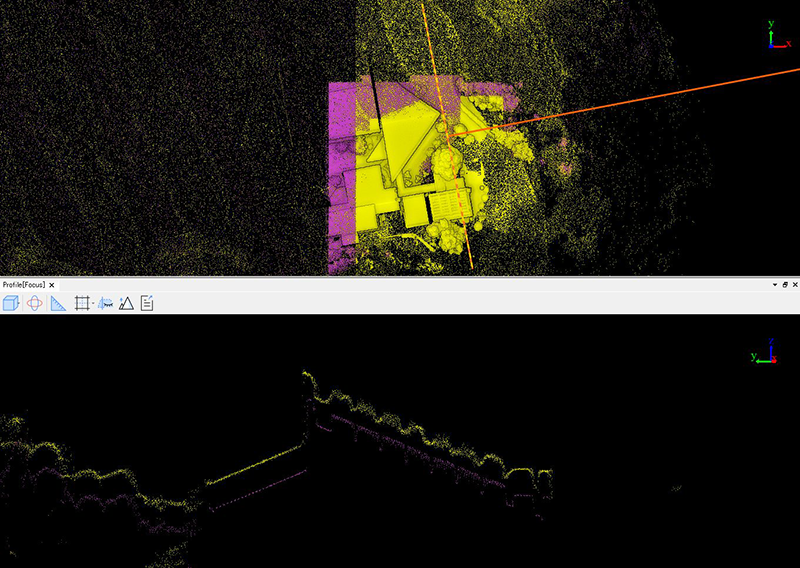
Fig.23 断面②拡大1
L2(ピンク)ほぼ平面に比べてL1(イエロー)が大きく波打っている。
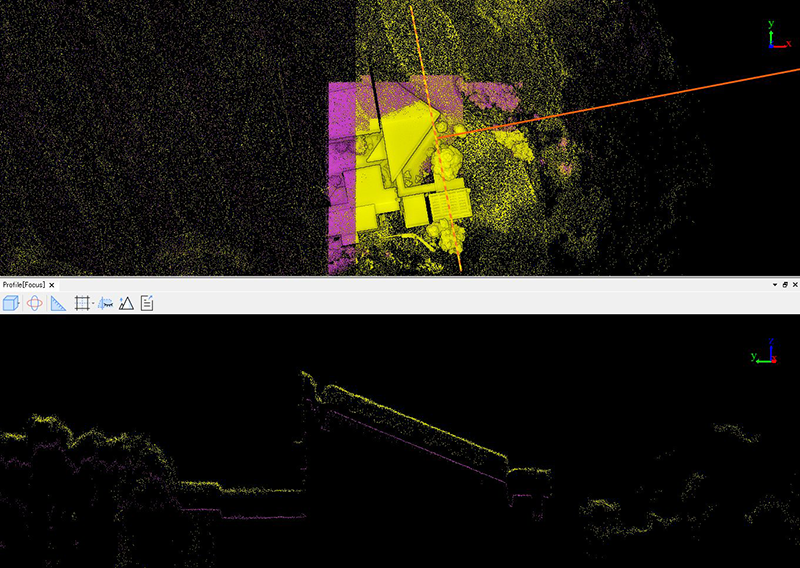
Fig.24 断面②拡大2
L1は、場所によっては平らになる部分もある(板の接合部と思われる)。

Fig.25 実際の建物の屋根形状写真
この屋根部は、すのこ状の板を束ねたような形状をしている。上記Fig.23のL1のデータは丁度画像内の赤枠部分と思われるが、表面の平面が出ていない。
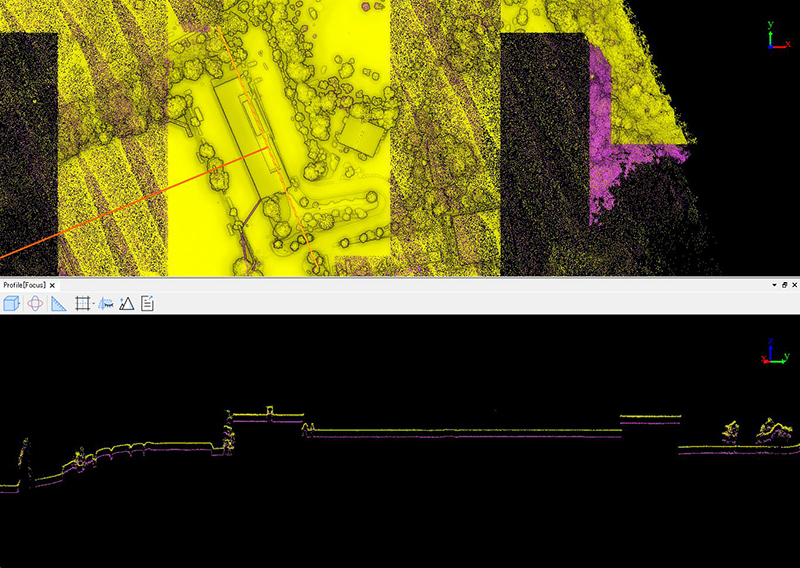
Fig.26 断面③
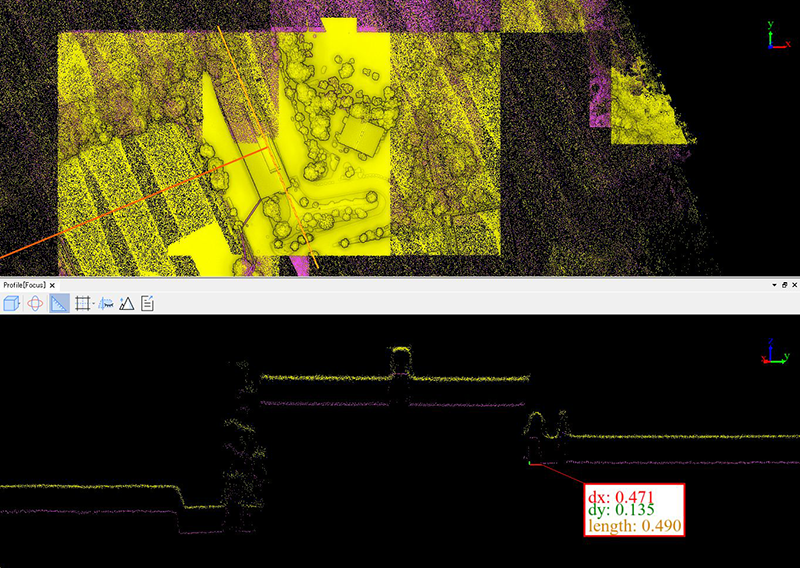
Fig.27 断面③拡大1 画面中央の屋根上の突起物(幅約0.8m)は同等だが、右側の幅約0.5mの設備機器は形状の再現性に差が出ている。

Fig.28 実際の建物形状写真
幅約0.5mの設備機器 L2ではこの断面データがきちんと計測できているのは驚きだ。
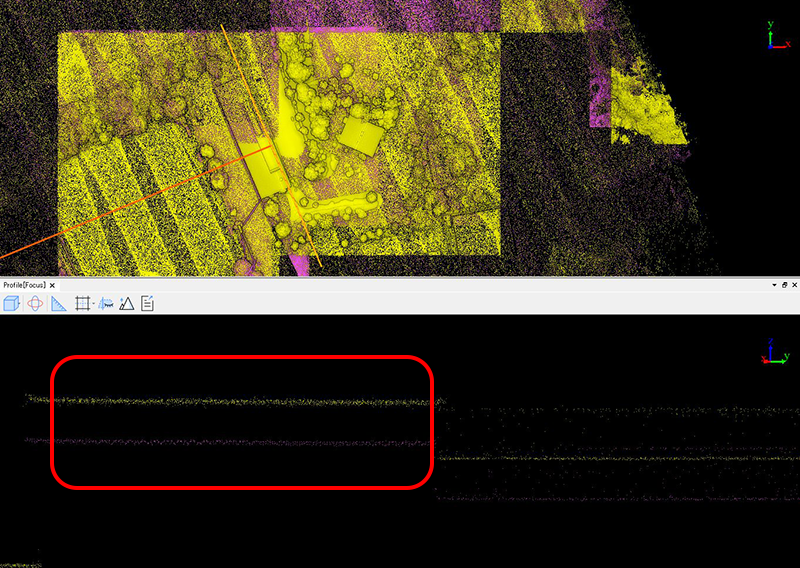
Fig.29 断面③拡大2 あとこの画像では分かり難いかもしれないがL2では屋根瓦の波打ちまで表現できている。
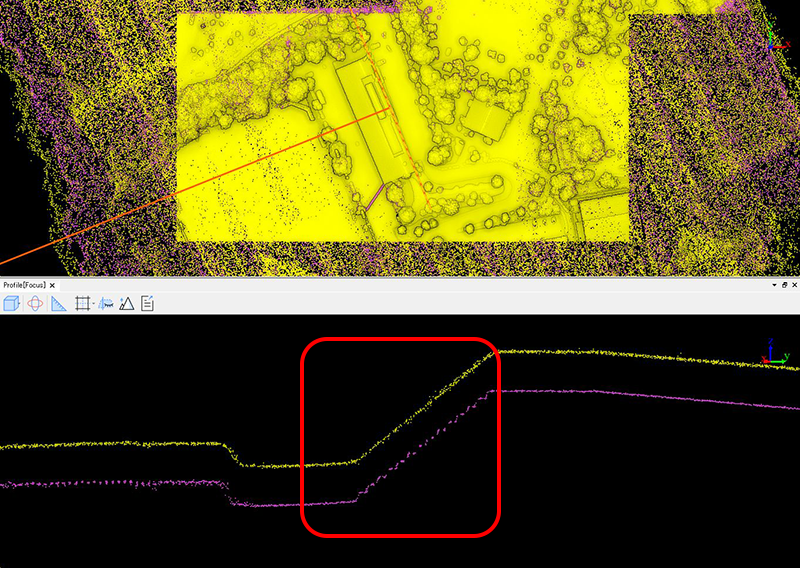
Fig.30 断面③拡大3 本建物に付随している階段の再現性はL2のフットプリントの小ささが反映されている事がよく分かる。
ただ、L2の点群が網目状に間引かれたような点群になっているのが少し気になった(この点は後述する)。
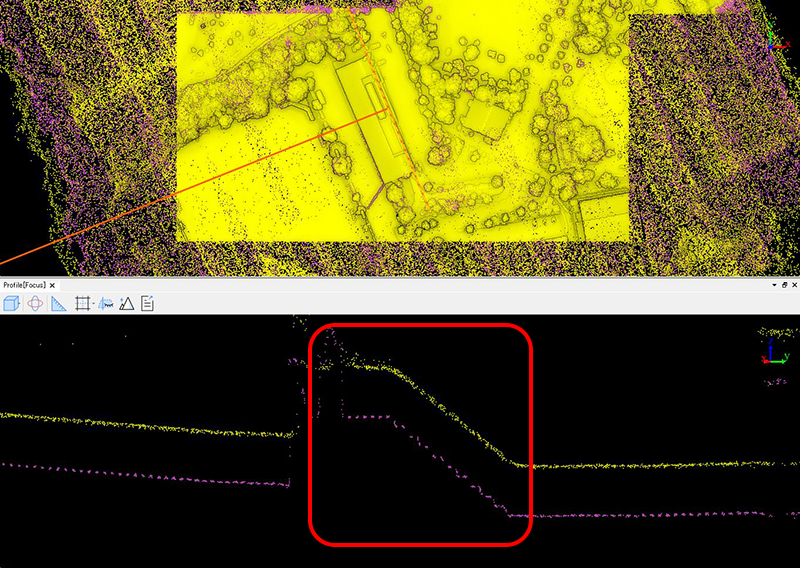
Fig.31 断面③拡大4 本建物に付随している階段の再現性はL2のフットプリントの小ささが反映されている事がよく分かる。
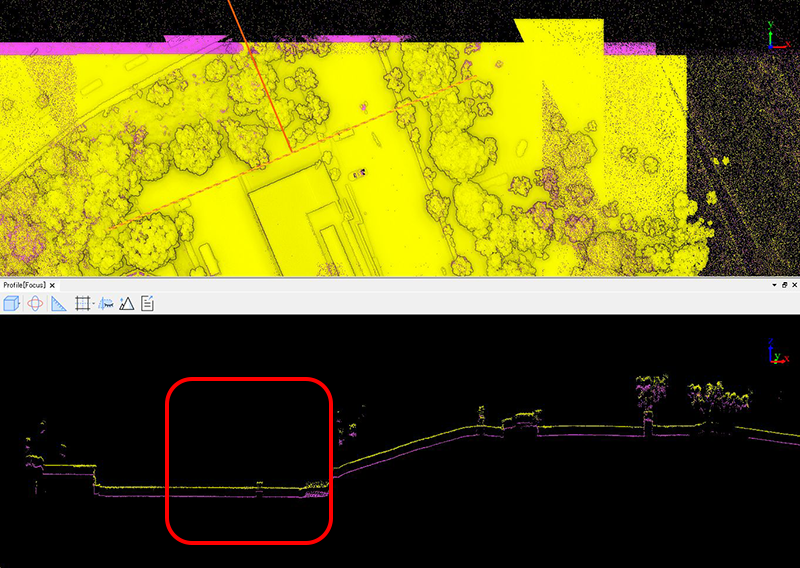
Fig.32 断面④
ここには地面から0.6mの高さに設置した70cm角の対空標識(白黒十字の平面板)の再現性を確認した。
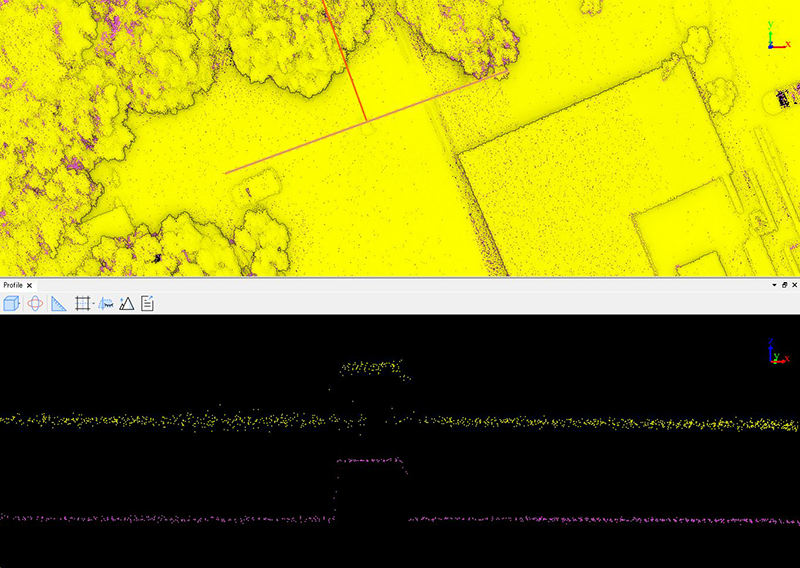
Fig.33 断面④拡大1 L1もL2も天板の面は出ているが、L1はクラウド幅が厚く、若干角が取れているように見える。
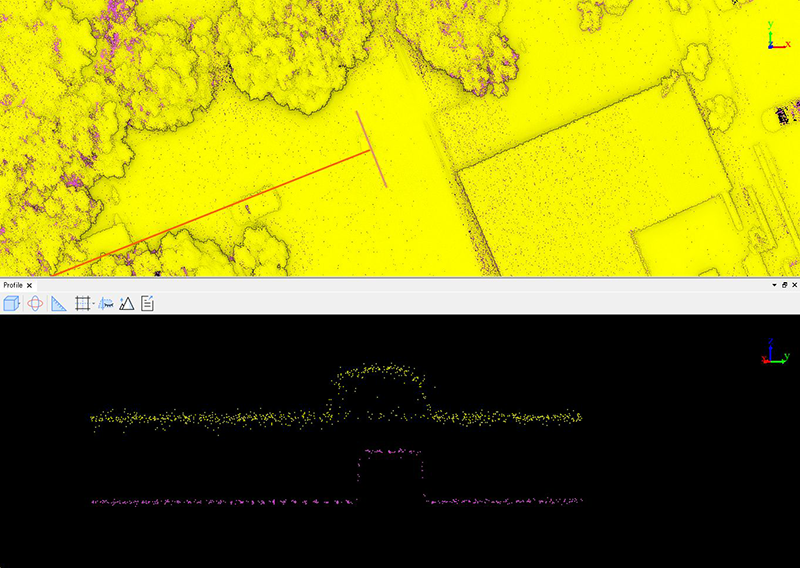
Fig.34 断面④拡大2 断面抽出方向を90度回転させるとL1のデータが更に角が丸くなる。L2のデータは断面方向にかかわらず天板の面と角が正確に出ている。

Fig.35 対空標識の識別に関しては、断面方向だけでなく平面的に見ても違いは一目瞭然である。L1のRGB表示だと対空標識と認識は出来るが、反射強度表示にすると、、、

Fig.36 L1点群平面視点(反射強度)
対空標識とかろうじて分かるが、長細くなっていて中心点を正確に抽出するのがこれまでは困難であった。
※RGBより反射強度表示の方が点群データの形状をより忠実に表している。
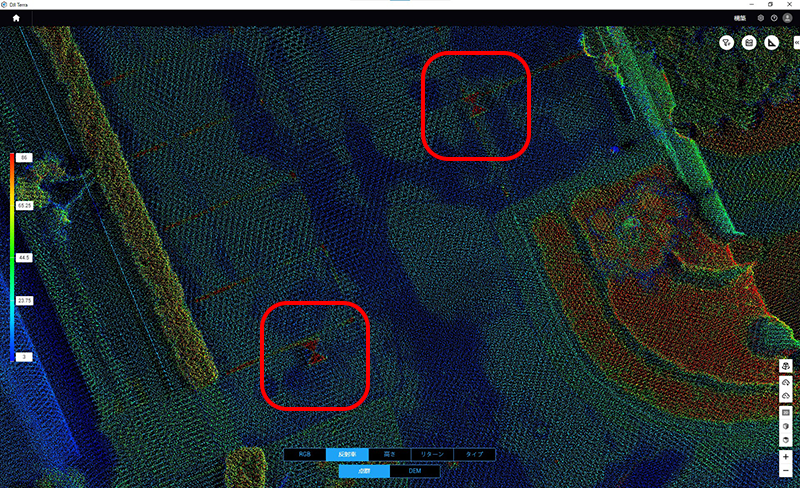
Fig.37 L2点群平面視点(反射強度)
対空標識の白い二つの三角形(上記画像だと赤色の三角形)がはっきりと再現されているのが分かる。対空標識の中心点を正確に抽出するのも劇的に容易になった。
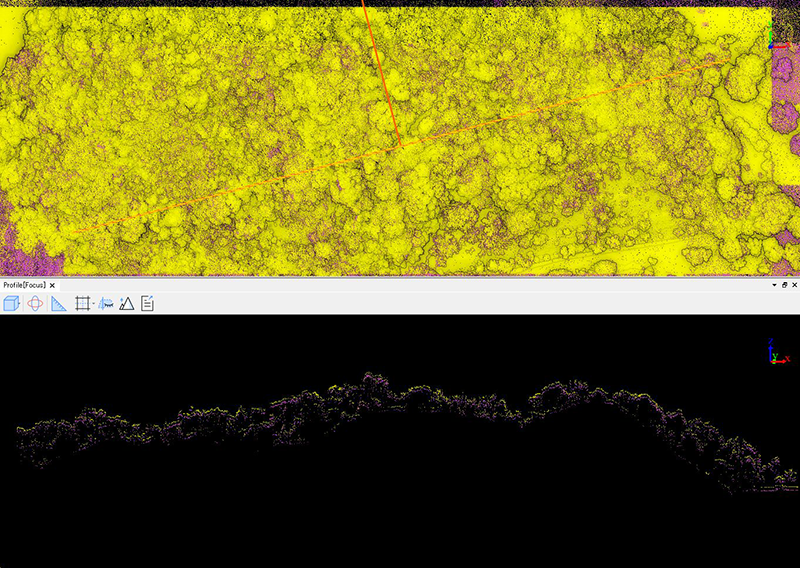
Fig.38 断面⑤ ここでは樹間貫通の程度を確認した。
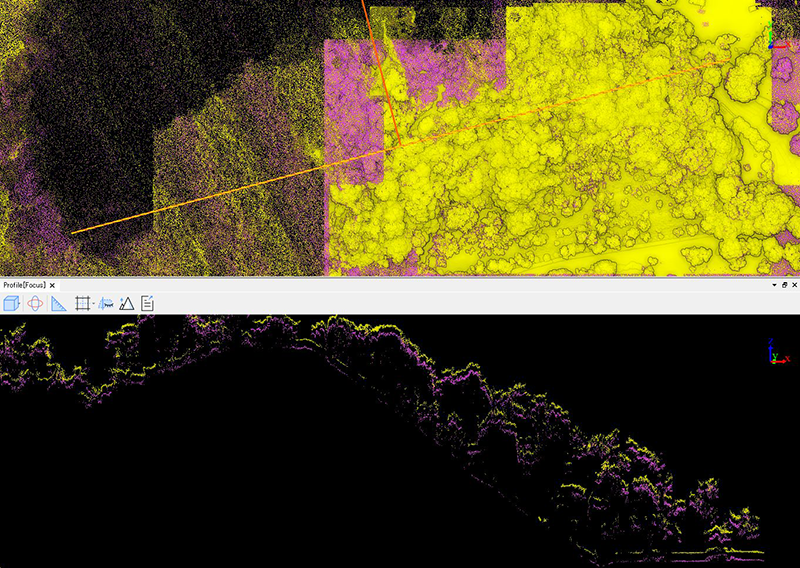
Fig.39 断面⑤拡大1 ここの断面位置ではどちらも取得した地表面に大きな差は感じられなかった。
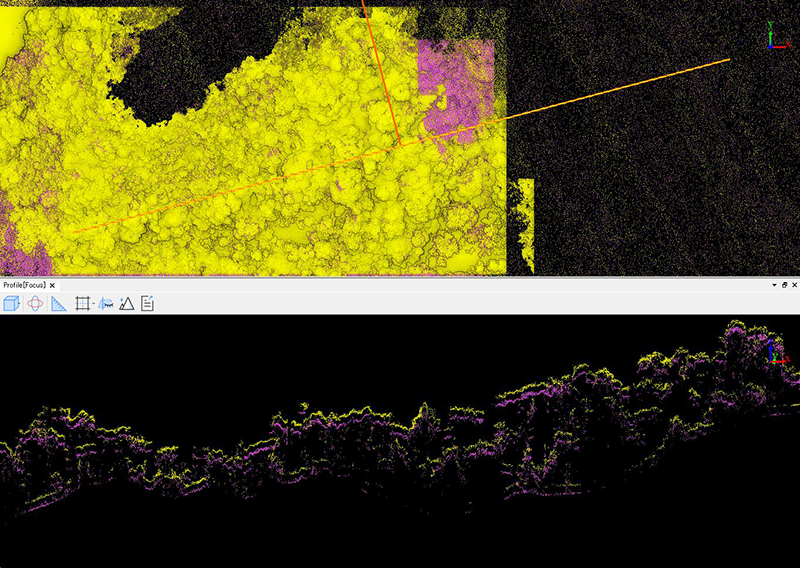
Fig.40 断面⑤拡大2 ここの断面位置ではどちらも取得した地表面に大きな差は感じられなかった。
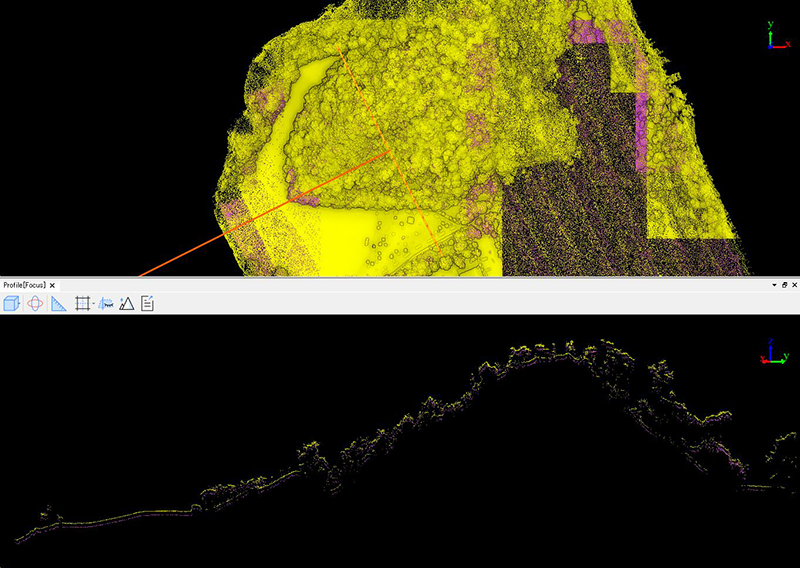
Fig.41 断面⑥ ここでも樹間貫通の程度を確認した。
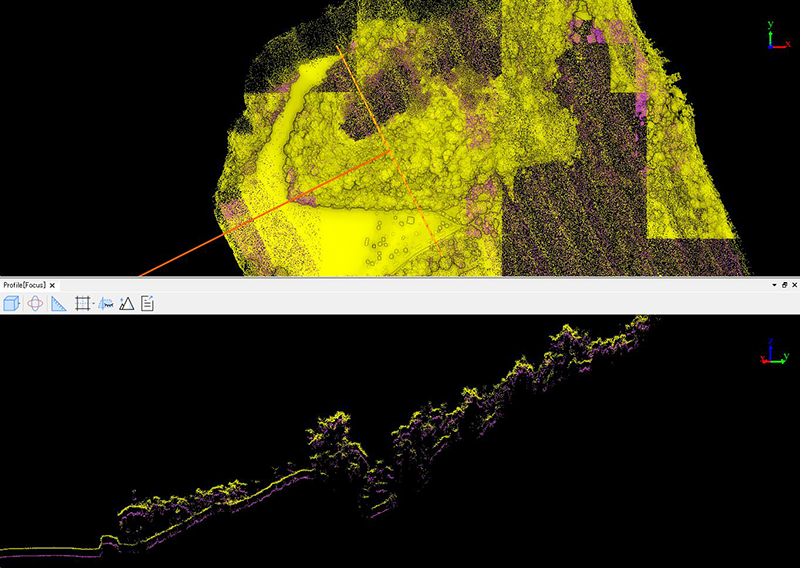
Fig.42 断面⑥拡大1 ところどころの部分で若干L2の点群の方が地表面を表現している箇所が見受けられた。
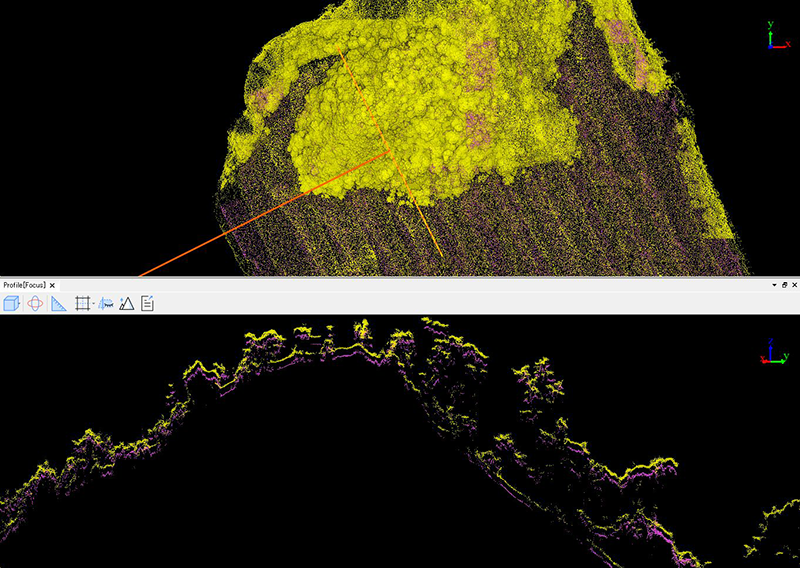
Fig.43 断面⑥拡大2 ところどころの部分で若干L2の点群の方が地表面を表現している箇所が見受けられた。
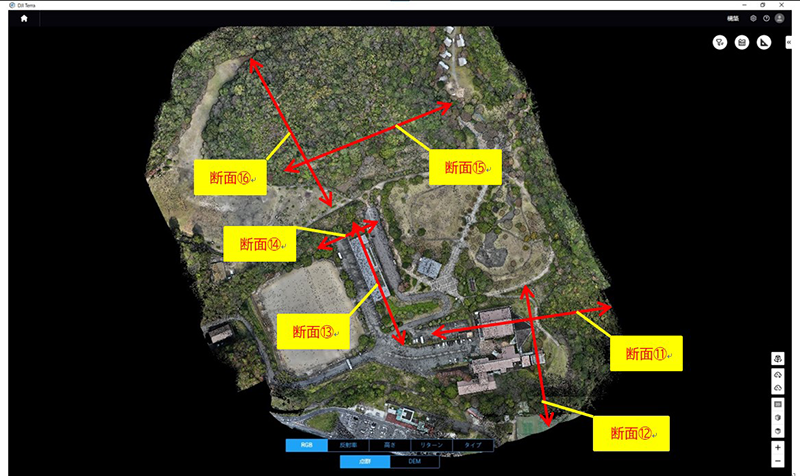
Fig.44 Zenmuse L2反復/非反復モード点群データ比較用断面抽出位置
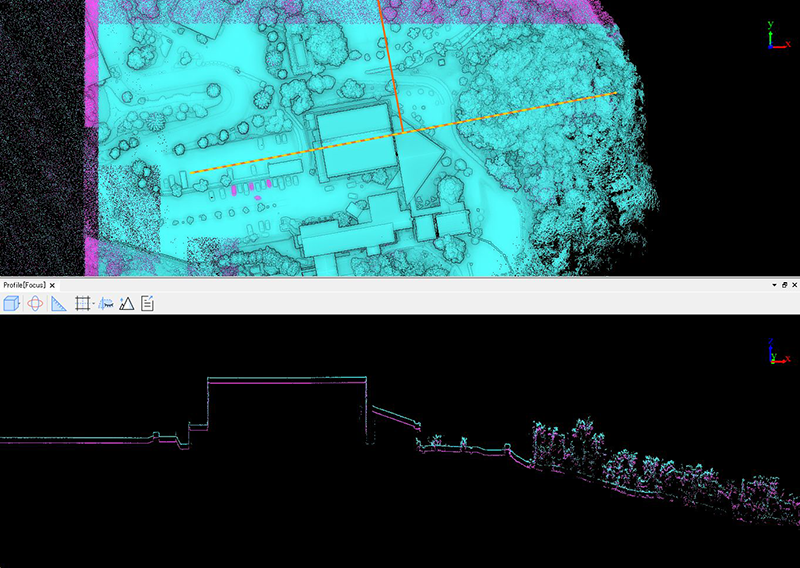
Fig.45 断面⑪ 断面スライス幅=0.1m
ピンク=L2反復/スカイブルー=L2非反復モード
(以下同じ)
※断面はL2非反復モード点群データを1m高く表示している。
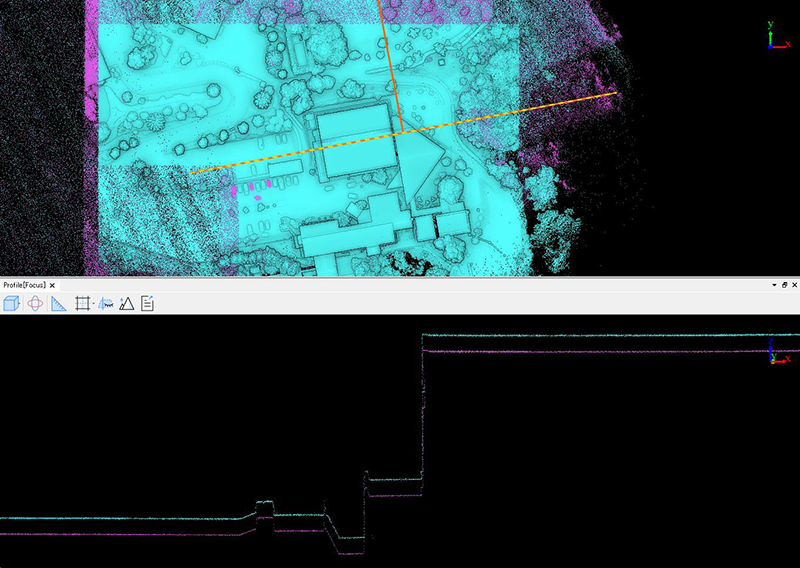
Fig.46 断面⑪拡大1
手すりや段差など構造物の部分にはこちらも大きな差は見られない。
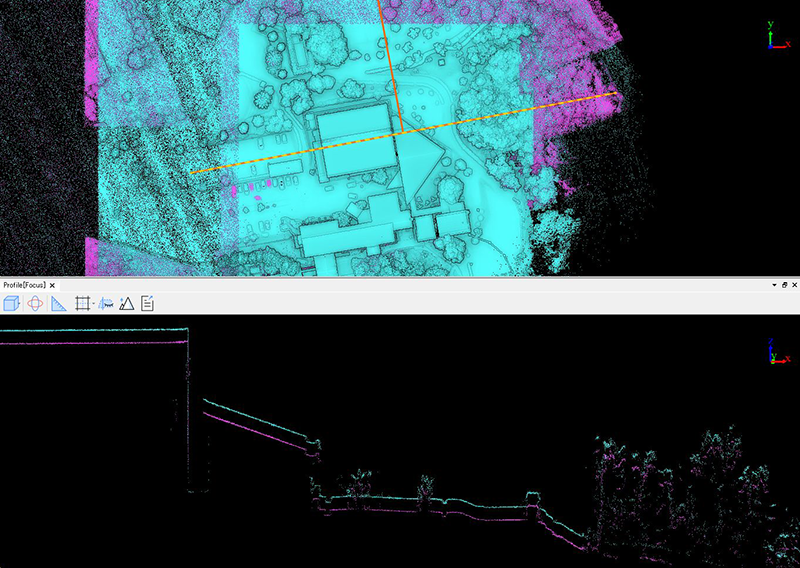
Fig.47 断面⑪拡大2
手すりや段差など構造物の部分にはこちらも大きな差は見られない。
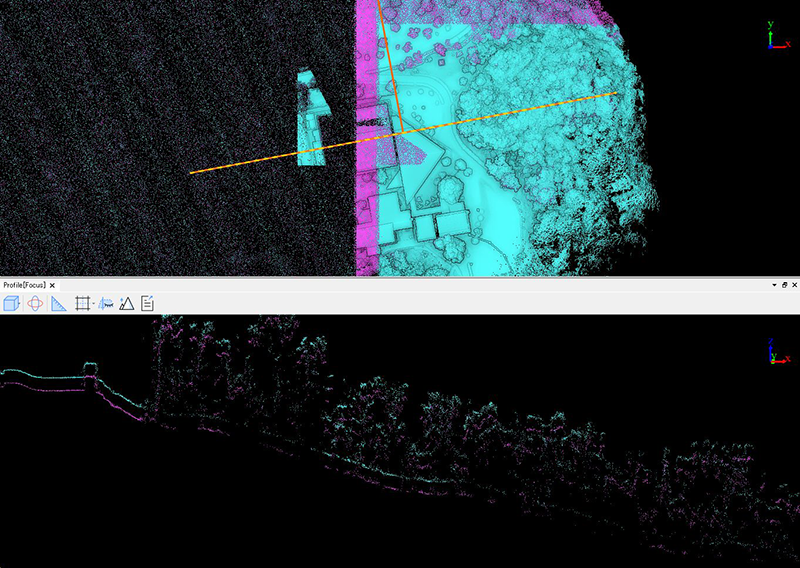
Fig.48 断面⑪拡大3
森林部の地表面はL2非反復モード点群データが明らかに多くの地表面を取得しているが分かる。
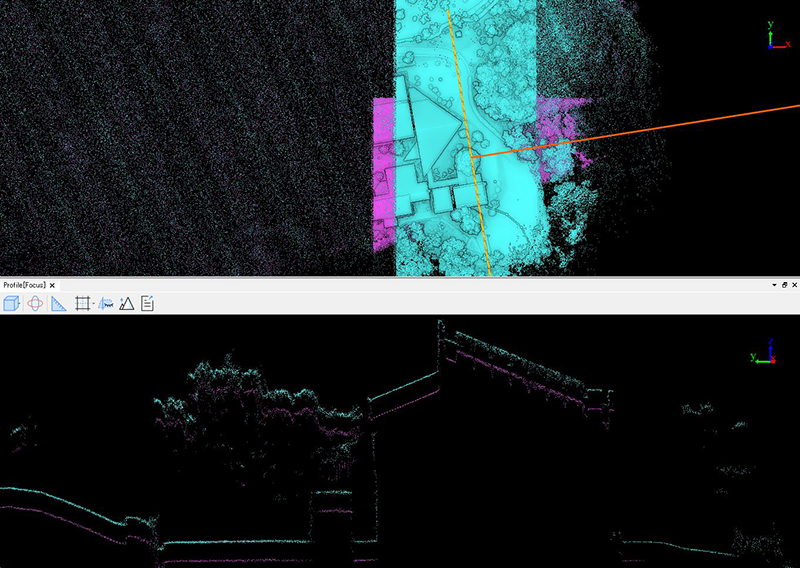
Fig.49 断面⑫-1
どちらの屋根の天板も平面形状がきちんと表現されている。
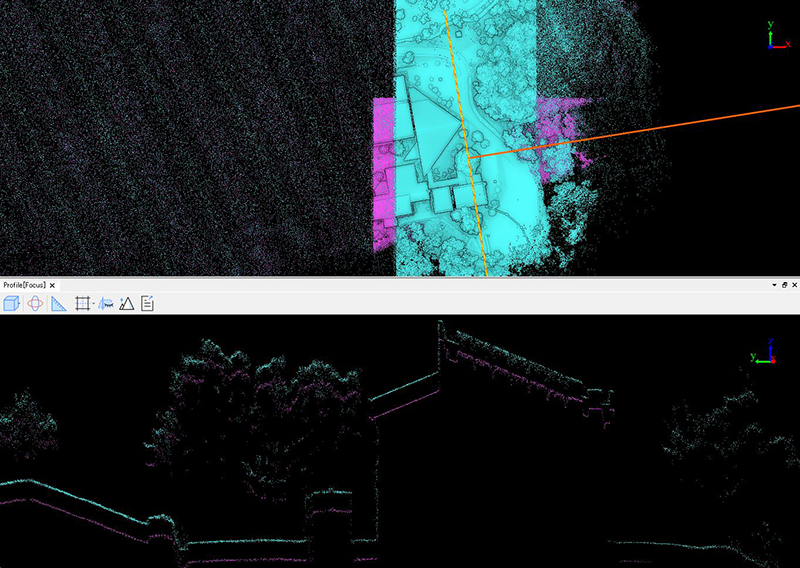
Fig.50 断面⑫-2
断面位置を変えても、平面形状がきちんと表現されている。
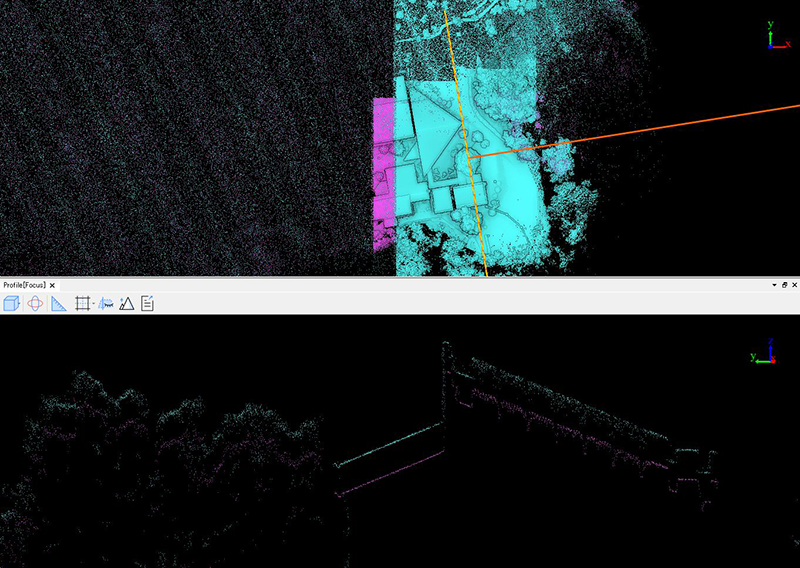
Fig.51 断面⑫拡大1
平面形状がきちんと表現されている。
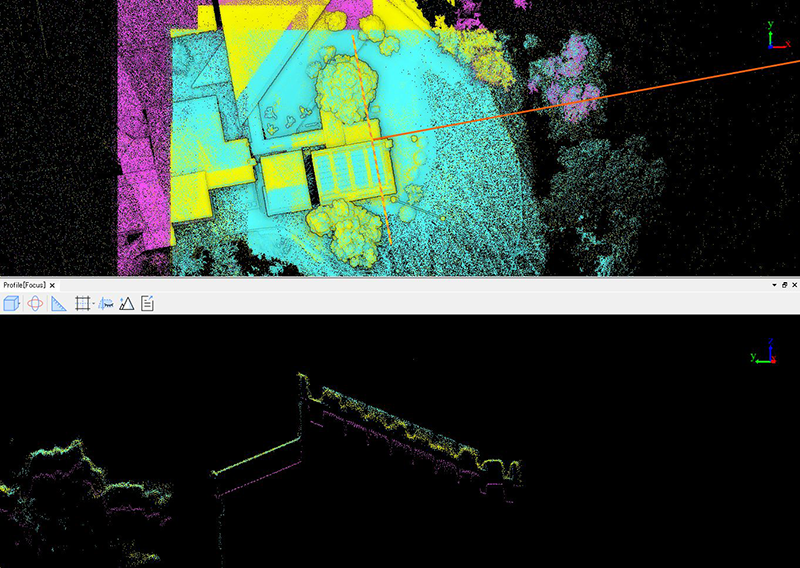
Fig.52 断面⑫拡大2
L1点群データも重ねて表示するとL1の天板上の点群データが波打っているのがよく分かる。
※イエローがL1点群データ
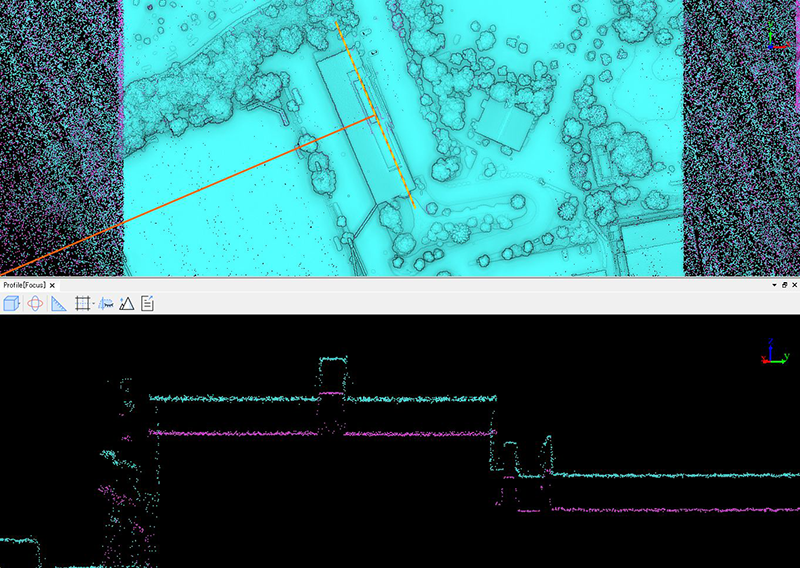
Fig.53 断面⑬拡大1
手すりや段差など構造物の部分にはこちらも大きな差は見られない。
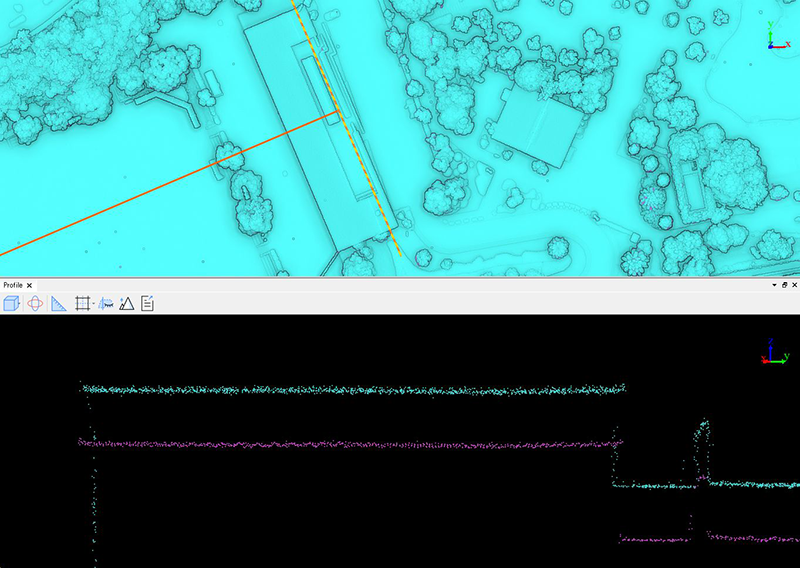
Fig.54 断面⑬拡大2
屋根瓦の波打ちについては非反復モードでは再現しているとは言えない。
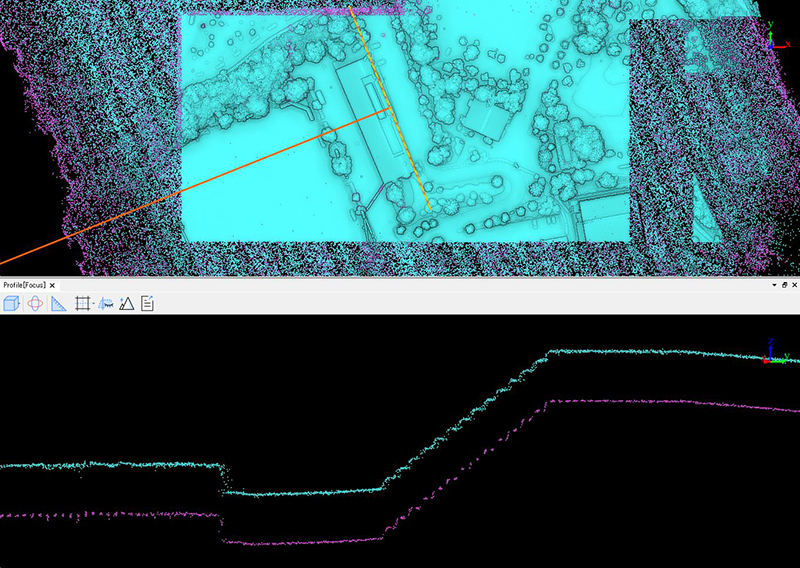
Fig.55 断面⑬拡大3
階段部分の段差の形状はどちらもよく分かる。反復モード点群データの抜けは、非反復モード点群データには見られない。
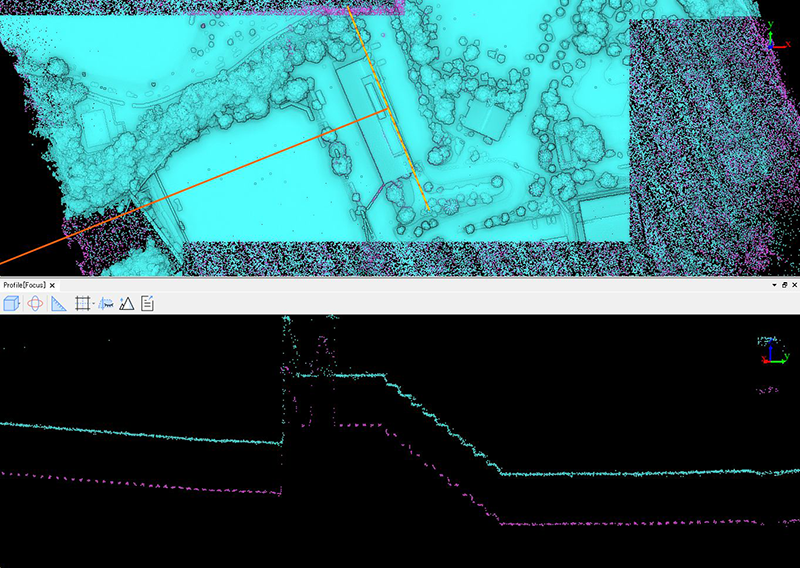
Fig.56 断面⑬拡大4
階段部分尾段差の形状はどちらもよく分かる。反復モード点群データの抜けは、非反復モード点群データには見られない。
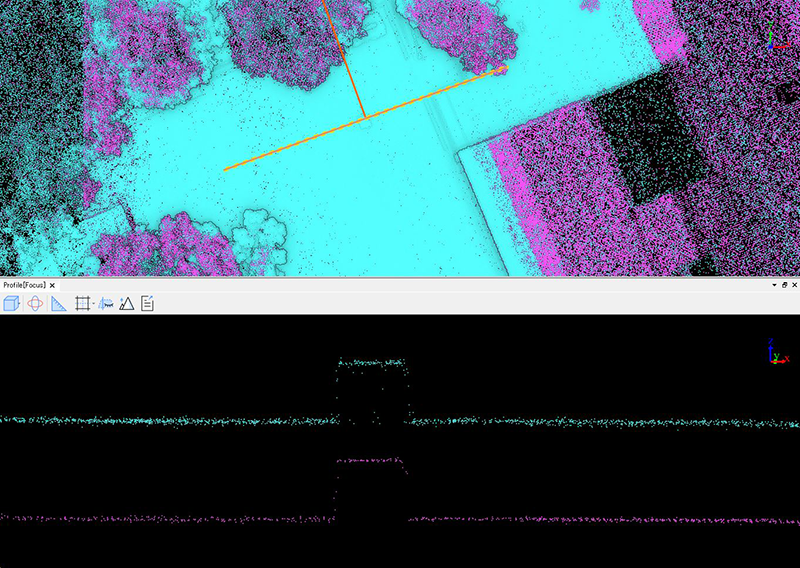
Fig.57 断面⑭拡大1
どちらの対空標識の天板の平坦形状を正しく表現している。
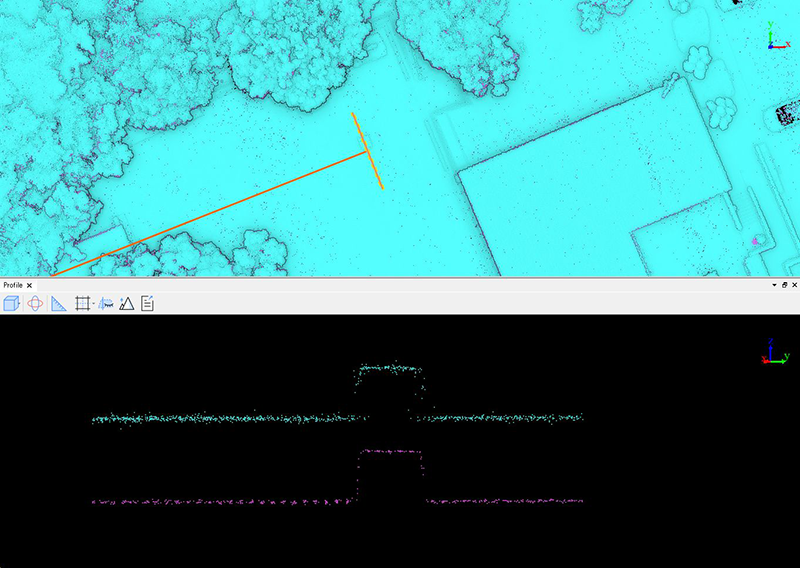
Fig.58 断面⑭拡大2
断面抽出方向を90度回転しても形状の再現度は変わらない。
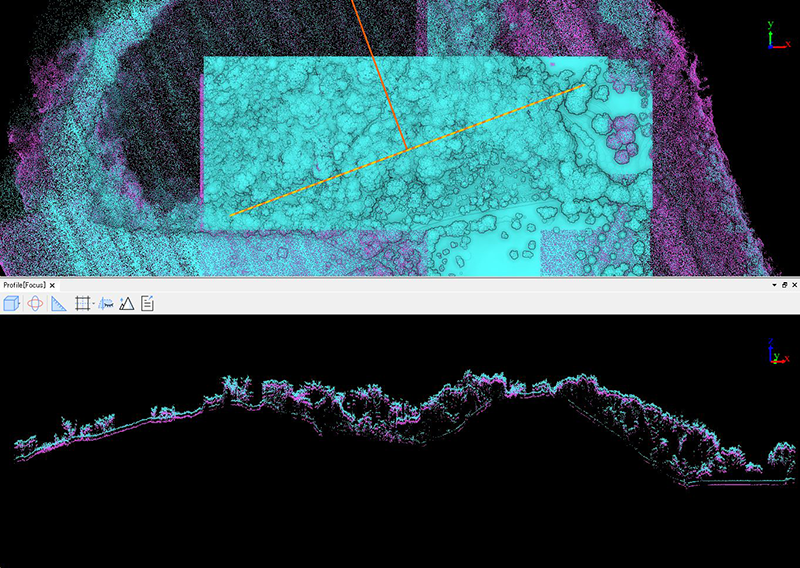
Fig.59 断面⑮ L2の反復モードと非反復モード点群データで樹間貫通の程度を比較した。
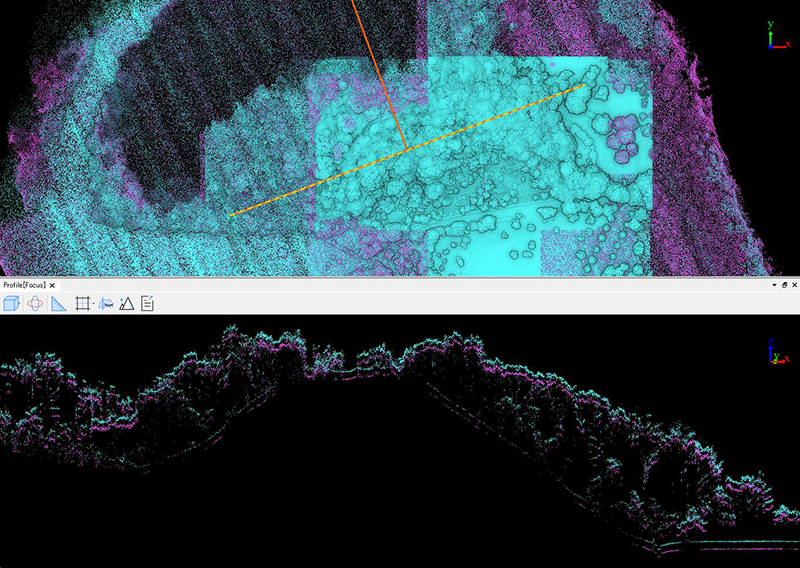
Fig.60 断面⑮拡大1 明らかに非反復モードの点群データの方が多くの地表面を拾っている。
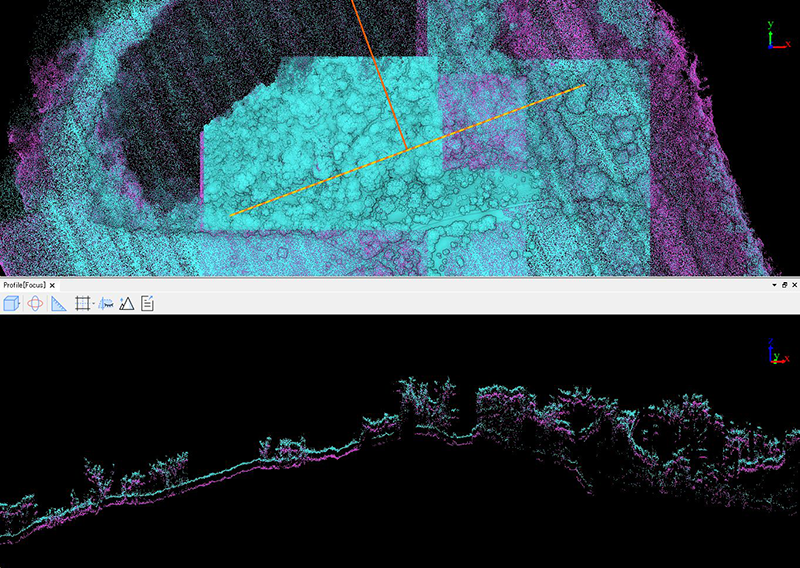
Fig.61 断面⑮拡大2 明らかに非反復モード点群データの方が多くの地表面を拾っている。
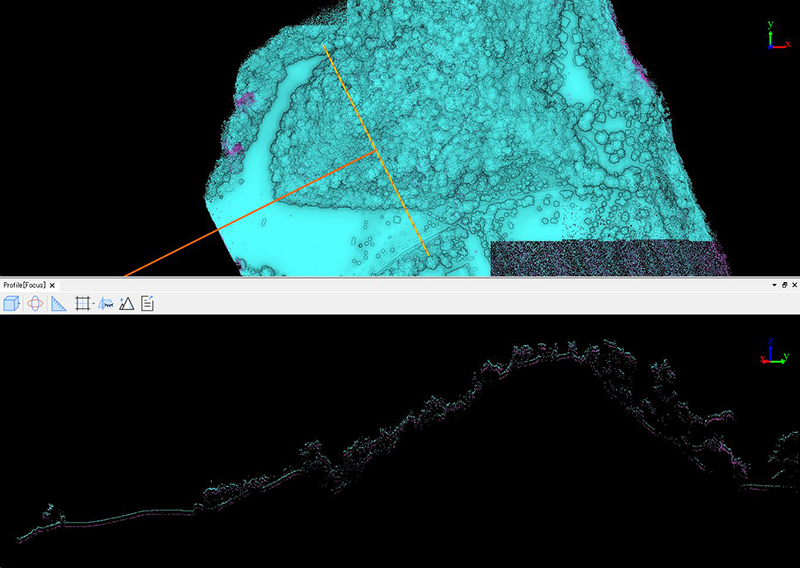
Fig.62 断面⑯ こちらの断面においても非反復モードデータの方が明らかに多くの地表面を拾っているのが分かる。
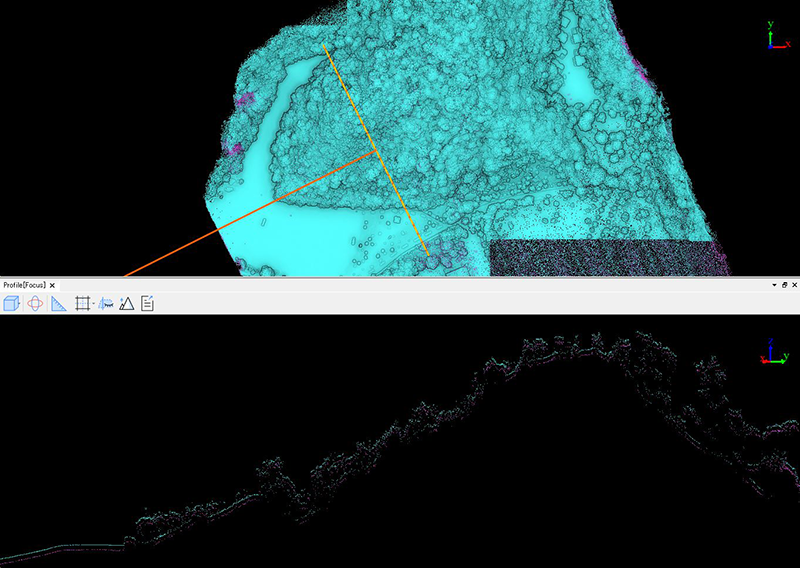
Fig.63 断面⑯拡大1 こちらの断面においても非反復モード点群データの方が明らかに多くの地表面を拾っているのが分かる。
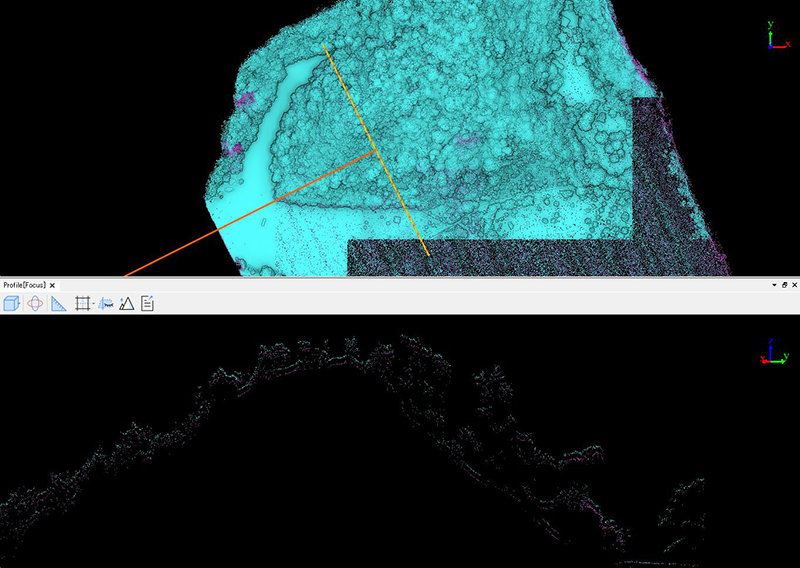
Fig.64 断面⑯拡大2 こちらの断面においても非反復モード点群データの方が明らかに多くの地表面を拾っているのが分かる。
Zenmuse L2とL1とで検証点の比較を行った。再現性や公平性を担保するためにソフトウェアによる自動検証点機能を用いて、Z値のみの比較を行った。ただ、DJI TERRAの検証点機能は地面直置きの検証点(対空標識)であれば有効であるが、LiDARドローン用の地面からかさ上げして設置した対空標識に対しては正確な値が得られない為、今回はGreenValley社LiDAR360の検証点機能を用いて比較した。

Fig.65 対空標識設置位置(全体)

Fig.66 対空標識設置位置(拡大)
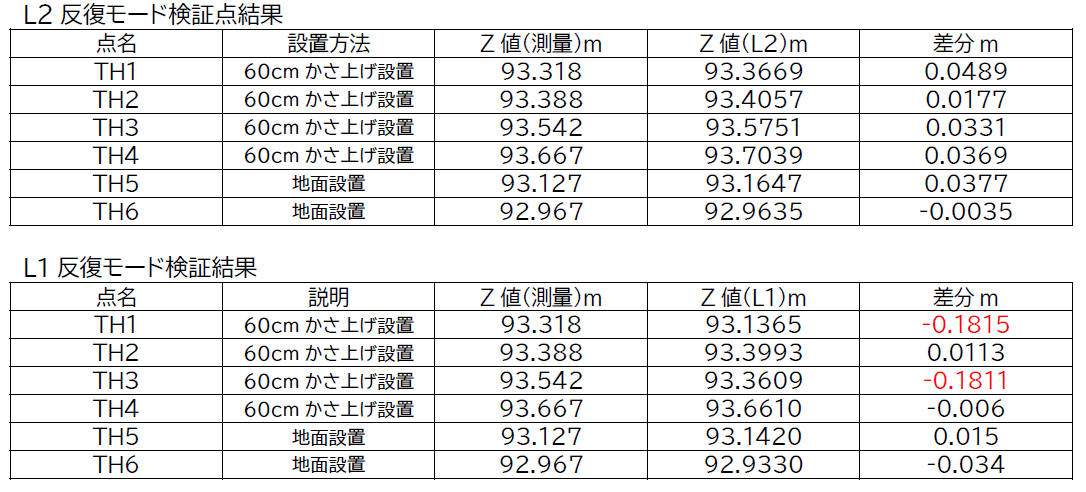
L2は総じて4~5cm以内に収まっているのに対して、L1はTH1とTH3については対空標識下面のノイズを拾ったのか18cm程度の差が出ている。しかし、L1対空標識の位置がその値分ずれているのではなく、周辺点群を平均化して解析する算出方法によるものと思われる。
⇒L1点群はクラウド幅が厚く、かつノイズが多いという事でもある。
今回の比較検証結果を見て、最初に感じたのはL1の健闘ぶりだった。L2が測定精度の大幅な向上やフットプリントの縮小、搭載カメラの高性能・高精細化などL1と比べて確実にブラッシュアップされているのは明白だが、L1も対地高度を確実に50m以内に抑えるなどいくつかの注意点を守れば、それなりの精度および地表面を取得できるという事だと思う。
ただ、L1が既に販売を終了してL2がL1と同等の価格帯で発売されることが確定したことで、L1の役割は終了したと言える。L2であれば、対地高度100mであってもL1の対地高度50mのデータよりも高精度なデータを取得することが出来るだろう。飛行高度を上げられるという事は、業務の効率化と飛行リスクの低減にダイレクトに反映されるのは言うまでもない。
また、このL2が最新モデルのMatrice350RTKだけでなく、旧モデルのMatrice300RTKでも使用できることもユーザーにとっては非常に喜ばしい点である(コントローラはRC PLUSへの交換が必要)。L2の業界シェア拡大をさらに後押しすることになるだろう。
昨今の点群データは、高品質でかつ広範囲のデータがいとも簡単に取得できるようになり、LiDAR機器においても据置型だけでなく、手持ちタイプやバックパック型に加えて自動車、ドローン搭載型などの移動しながらダイレクトに計測できるタイプなど機器の選択肢も広がってきており、それぞれの機器のいい所取りが出来るようになってきている。
点群データがかなり身近な存在になったこともあり、求められる点群データには3次元位置精度や低ノイズだけでなく、見易さやデータの奇麗さ(取得する点群の均等さやRGB・反射強度などを反映した時の点群データの色彩表現)までもが非常に重要な要素となってきている。
その中においてもDJI Zenmuse L2のMatrice350RTKを含めたLiDARドローンはその安全性と簡易性、対コストにおけるデータの品質においては群を抜いており、正直なところ驚きを隠せない。
L2の発売により、これまで少なからずあったL1のネガティブな要素はほぼ解消され、今後はDJI製LiDARドローンが実際の計測現場での選択肢に確実に入ることになると思う。
ただ1点、本文中でも触れたが、L2反復モードにおける点群データの網目状の抜けが懸念される。場所にもよるが飛行高度50mで0.1mくらいの均等な網目状の隙間が出来ている。0.1mの隙間は平面的に見れば大きな問題にはならないかもしれないが、断面データを抽出する際、スライス幅を0.1m程度にすると点群データが場所や断面方向によっては半分くらいしか表示されていないことになる。これではせっかく高精度とフットプリント縮小による細部の再現性が台無しになると思う。 L2の非反復モードのデータでは、多少の隙間はあるがランダムに散らばっているため、断面を抽出しても特にデータの抜けは気にならないが、細部の再現性の観点からみると反復モードは現時点ではL2であっても外せない選択肢になると思われる。
なお、本レポート執筆中にL2の新しいファームウェア(V01.00.00.02)がリリースされ、直ぐに適応して確認してみたが、この網目状の点群抜けの現象は改善されていなかった。場合によってはこの症状は機器の仕様上致し方ないものなのかもしれない。
またこの症状が全てのL2に見られるのか、あるいは弊社個体固有のものなのか、今後の他社の発表するレポートやさらに多くの個体を確認するまでは分からないが、仮にどちらのケースであっても今後のファームウェアのアップデート等による改善を期待する。
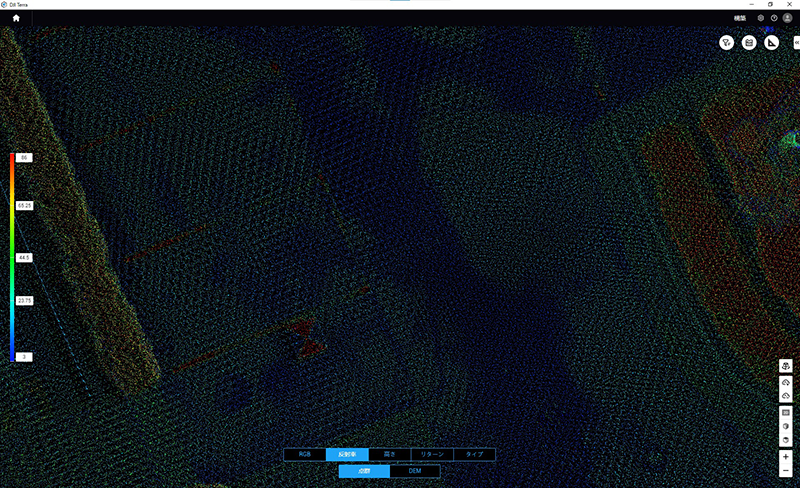
Fig.67 L2反復モード(反射強度)平面視点
画像だと分かり難いかもしれないが、点群データが均等に並んでおらず、網目状になっているため断面を切ると点群データが歯抜けの様になってしまう。
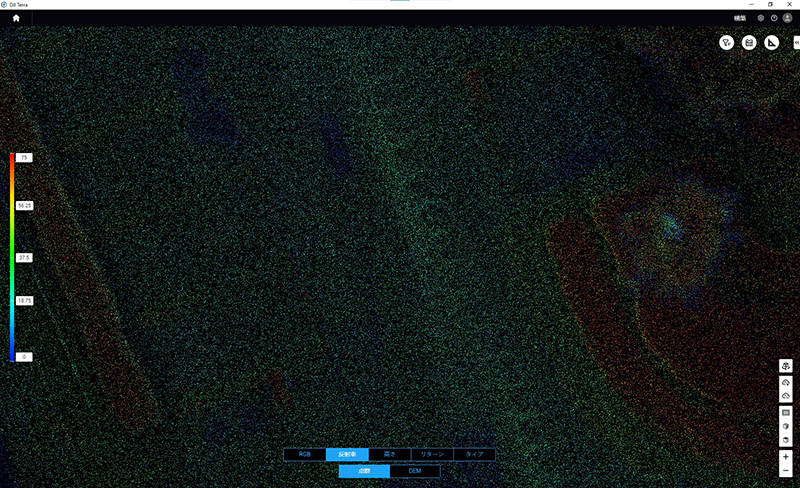
Fig.68 L2非反復モード(反射強度)平面視点
L1データやL2非反復のデータは、点群データは均等ではないがL1反復点群データのような歯抜けデータは見られない。
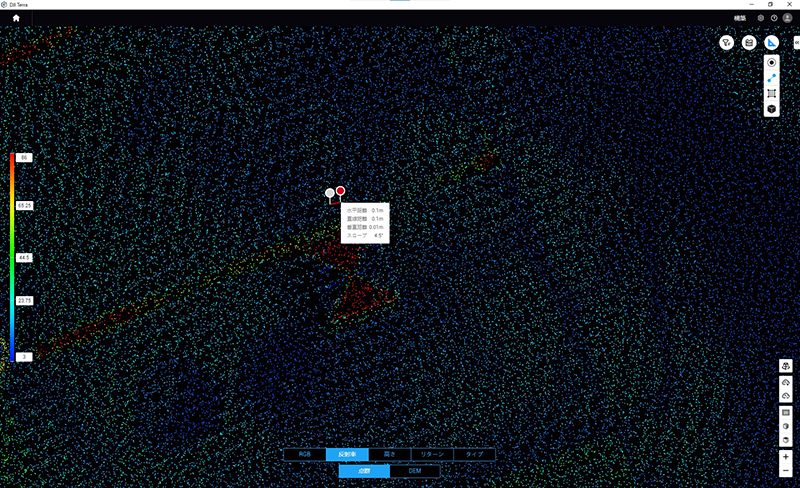
Fig.69 L2反復モード(反射強度)拡大1
均等な間隔で0.1mくらいの網目状の隙間が出来ている。
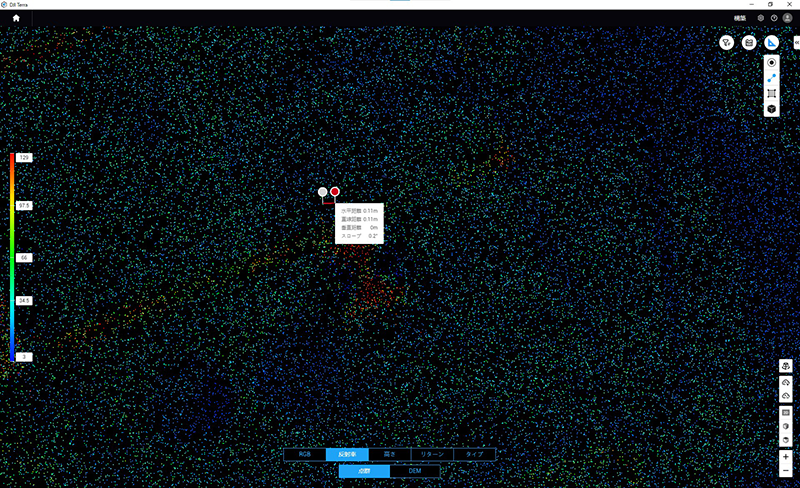
Fig.70 L2非反復モード(反射強度)拡大1
非反復データでは、多少の隙間はあるがランダムに散らばっているため隙間がそれほど目立たない。
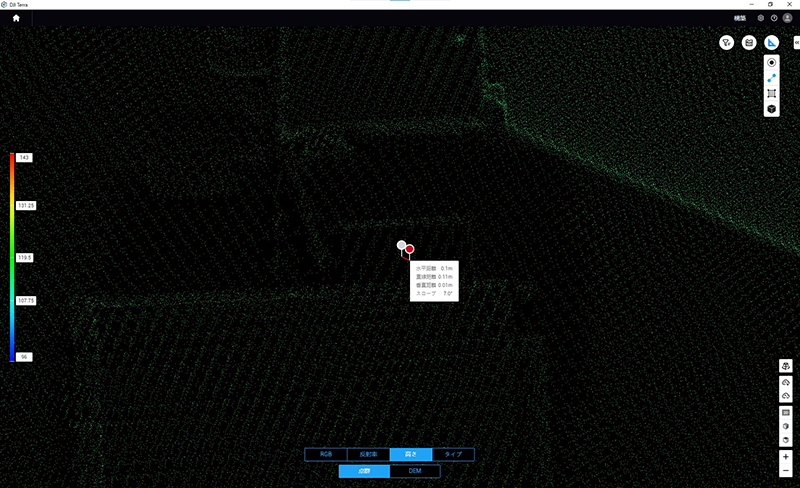
Fig.71 L2反復モード(新FWアップデート後)
高度50m
新FW適応後でも0.1mの網目状の隙間が出来る。
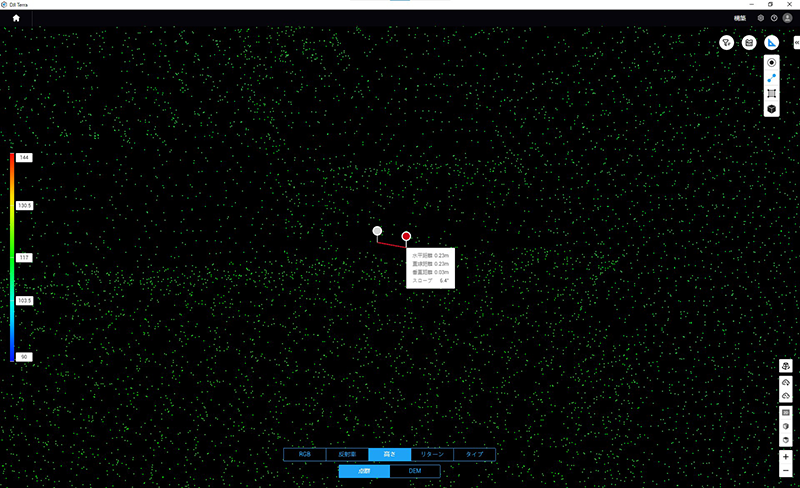
Fig.72 L2反復モード(新FWアップデート後)
高度100m
リターン数による差は見られなかったが、飛行高度が2倍になると隙間も約2倍(約0.2m)になっている。
作成 株式会社神戸清光 DJIインストラクター 藤井達也