
XGRIDSとは?
現実世界を、正確に・高速に・そのままデータ化する。 誰でも簡単、高精度・高画質3Dハンディスキャナー
価格・特徴・活用事例・他社比較まで徹底解説
現実世界を、正確に・高速に・そのままデータ化する。 誰でも簡単、高精度・高画質3Dハンディスキャナー
価格・特徴・活用事例・他社比較まで徹底解説

神戸清光は、XGRIDS社の正規販売店 グローバルパートナーです。
2025年売上実績No.1(※メーカー調べ)
建築・土木、設計、測量、土地家屋調査、不動産、プラント、映像・CG、
その他 多くの業界で導入実績あり。
デモ、導入、レンタル、計測、解析、最適なご提案。
XGRIDSは「歩くだけで空間を高精度に3D化できる3Dスキャナー」です。
従来の据置型測量機と異なり、移動しながらデータ取得ができるため、作業時間を大幅に短縮できます。
XGRIDSはこんな課題を解決します。
●測量に時間がかかる → 短時間で広範囲スキャン
●人手不足→ 少人数で対応可能
●データ活用ができていない→ 3Dデータ化でDX推進
XGRIDS導入のメリット
●作業時間の大幅短縮
●コスト削減
●DX推進
✔誰でも簡単:撮影は歩くだけ
✔ 高精度:LiDAR + カメラで高品質データ




2026/7/14
2026/5/12
2026/4/16
XGRIDSはLiDARとSLAMを組み合わせることで、高精度かつ高速な3D計測を実現します。
LiDAR:レーザーで距離を測定し点群を取得
ビジュアルSLAM:カメラで位置を推定
マルチSLAM:LiDARと映像の融合
3DGS:写真のような3D表現
SLAM(Simultaneous Localization and Mapping)とは、センサー情報をもとに自身の位置を把握しながら、
同時に周囲の空間をマッピングする技術です。GPSが利用できない屋内や複雑な現場でも安定した3D計測が可能です。
【ポイント】
GPSが使えない屋内でもOK
歩くだけで空間を記録できる
LiDAR(ライダー)とは、LiDARはレーザー光を照射し、その反射時間から距離を測定することで、
高精度な3Dデータ(点群)を取得する技術です。
暗所や広範囲の現場でも安定した計測が可能です。
【ポイント】
高精度(ミリ単位レベル)
暗所でも計測可能
点群データを生成
3DGS(3D Gaussian Splatting 3Dガウシアンスプラッティング)とは、点群や画像データをもとにリアルな3D空間を生成する最新技術です。
従来の点群と比較して軽量かつ高精細な表現が可能で、
Web上での共有や遠隔確認など、実務での活用に適しています。
従来の点の集まり(点群)を「ぼかした粒(ガウシアン)」で表現することで、軽い・リアル・滑らか
な3D空間を作る技術
これらの技術によりXGRIDSは、計測から活用までを一貫して実現します。
従来の3D計測が「取得して終わり」だったのに対し、
XGRIDSは「活用できる3Dデータ」を提供します。
現場
↓
3D計測(Lixel / PortalCam)
↓
点群取得
↓
3DGS変換
↓
デジタルツイン活用
■ 圧倒的なスピード
歩くだけで広範囲を短時間でスキャン可能
■ 高精度データ
LiDAR+SLAMによりcm精度を実現
■ 誰でも使える
専門知識不要、直感的操作
■ データ活用力
点群・3DGS・VRなど多用途展開
| 比較項目 | XGRIDS | 従来スキャナー |
|---|---|---|
| 測定方法 | 歩行 | 据置 |
| スピード | ◎ | △ |
| 操作性 | ◎ | △ |
| 価格 | ○ | × |
コンパクト設計のハンディスキャナーだから、撮影が難しくない
持ち運びしやすい軽量ボディ
スマホ感覚の操作性
撮影後はデータを数クリックで処理可能
これまで専門技術が必要だった3D撮影・計測が、一気に手軽になります。
XGRIDSで取得した3Dデータは単なる点群ではありません。
VR空間生成
Webブラウザでの3Dビュー
Unity・Unrealなどゲームエンジン対応
デジタルツイン化からビジュアルコンテンツ制作まで、プロジェクトの未来価値を高めます。







XGRIDS Lixel K2点群&3DGS長時間60分スキャントライアル@ライン邸
XGRIDS 新製品Lixel K2テストスキャン
XGRIDS社Lixel L2pro Lixel Cyber Color Studio 3DGS 動画
XGRIDS Lixel L2pro Lixel Cyber Color Studioテスト動画(3D Gaussian Splatting)@神戸布引の滝
XGRIDS PortalCam3DGSスキャンテスト @生田神社
DJI MATRICE 4Eのドローン写真とXGRIDS社Lixel Cyber Color Studioの3DGS地図合成を検証!

Lixel K2

PortalCam

Lixel L2pro・Lixel K1

Lixel L2pro・Lixel K1

Lixel K1
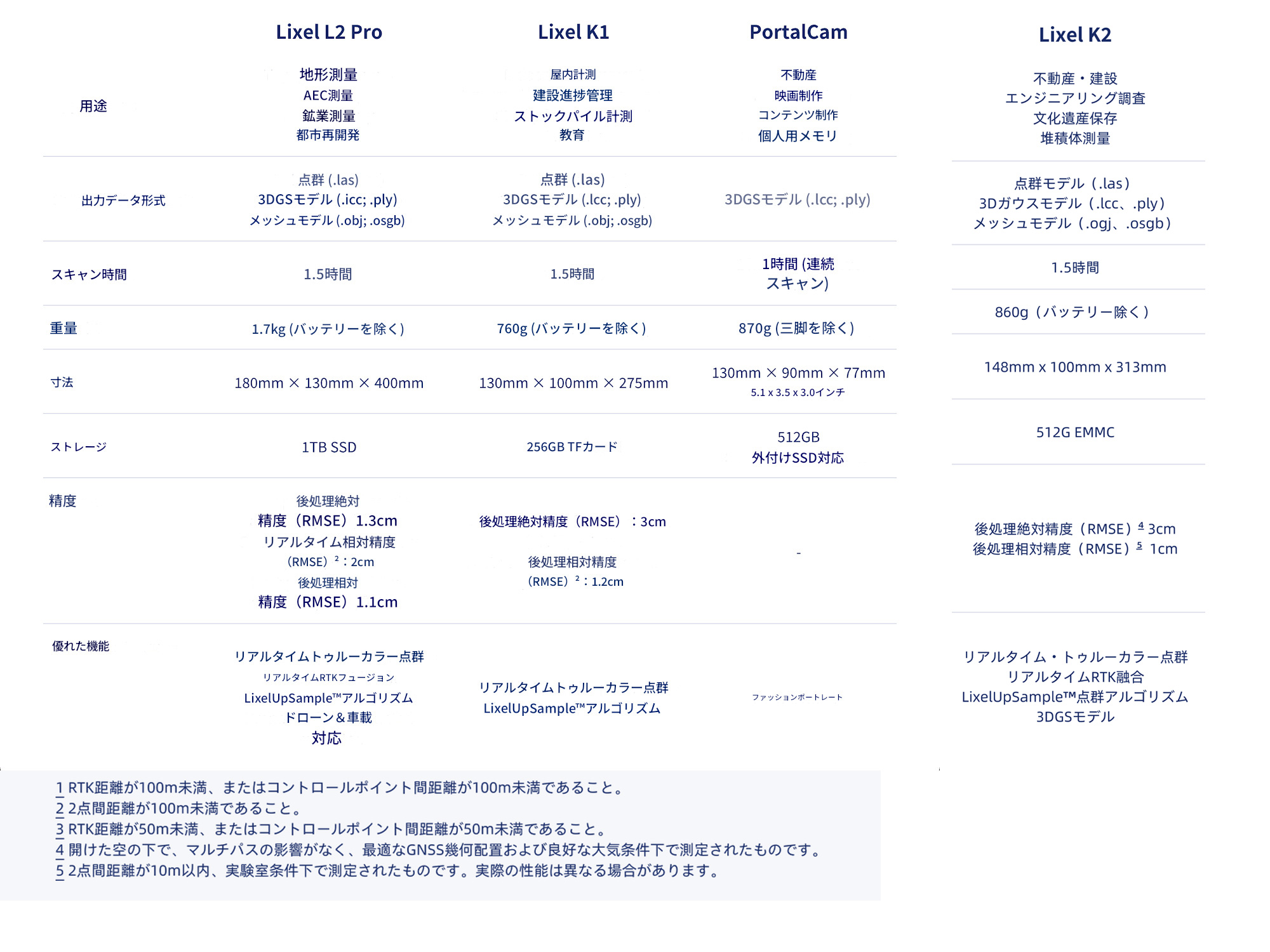
測量や高精度な点群取得にはLixel L2 Pro、コストや手軽さを重視する場合はLixel K1、映像や空間演出を重視する場合はPortalCamがおすすめです。
PortalCamは詳細ページでご確認ください。
Lixelシリーズは用途やオプション品、ソフトウエアで構成が変わりますので、ぜひお見積りご依頼ください。
XGRIDSは補助金対象となる場合があります。
補助金などを活用することで、導入コストを抑えることが可能です。
Lixel K2
ハードウェア
電源入力: 14.4V
消費電力 :<20W
重量[1] :約1,200g
データインターフェース : USB 3.1 Gen2
内蔵ストレージ: eMMC 512GB
RTKモジュール :(内蔵)
WiFi :IEEE802.11a/b/g/n/ac (2.4/5GHz)
Bluetooth:v2.1+EDR/ 3.0+HS/ 4.2 / 5.0
筐体素材 :航空機グレード・アルミ合金
連続駆動時間 :1.5時間
動作環境
動作温度範囲 :-20°C 〜 50°C
保護等級:IP54
バッテリー
電源方式:着脱式バッテリー
バッテリー容量:1,900 mAh
LiDARモジュール
レーザークラス:Class 1 / 905 nm
測定範囲:40m以上(反射率10%時) 100 m(カットオフ距離)
視野角 (FOV):360° × -7° to +52°
スキャンモード:移動計測(モバイル)
点群取得レート:200,000 点/秒
カメラモジュール
カメラ数:3(パノラマ×2、前方固定×1)
パノラマ視野角 (FoV):200° × 200°
前方カメラ視野角 (FoV):100° × 85°
解像度:4000 × 3000
センサーサイズ:1/2インチ CMOS
シャッター方式:ローリングシャッター
計測精度
絶対精度:垂直 (RMSE) [2]:3 cm
絶対精度:水平 (RMSE) [2]:3 cm
相対精度 (RMSE) [3]:1 cm
再現性[4]:2 cm
後処理点群の厚み:≤ 1 cm
リアルタイム絶対精度:垂直 (RMSE) [5]:3 cm
リアルタイム絶対精度:水平[5]:3 cm
主要機能
ビジュアル位置補正:対応
リアルタイムカラー点群生成:対応
点群最適化処理:対応
3DGS:対応(Lixel CyberColor経由)
出力フォーマット
点群データ.:.las
画像データ:.jpg
アクセサリ
スマートフォンホルダー :付属
コントロールポイント反射板 :付属
延長ポール&アダプターキット :オプション
[1] バッテリーおよびベースを含む重量です。その他のアクセサリは含まれません。
[2] 上空視界が良好で、マルチパスの影響がなく、最適なGNSS衛星配置および良好な気象条件下で測定された数値です。
[3] 10m以内の点間距離において、ラボ環境下で測定。実際の性能は使用環境により異なる場合があります。
[4] ラボ環境下での測定値です。実際の性能は使用環境により異なる場合があります。
[5] 上空視界が良好で、マルチパスの影響がなく、最適なGNSS衛星配置および良好な気象条件下での測定値です。
WGS84およびCGCS2000座標系のみに対応しています。
PortalCam
【物理仕様】
消費電⼒: <20W
本体重量: 870g ※三脚を除く
⼨法: 130mm × 90mm × 77mm
筐体素材 :航空宇宙グレードのアルミ合⾦
【接続・ストレージ】
データインターフェース: USB 3.0
内蔵ストレージ :512GB
GPSモジュール: 対応
WiFi :802.11 a/b/g/n/ac/ax
2.4GHz: 2412–2472MHz
5GHz: 5180–5240MHz
5GHz: 5745–5825MHz
【電源システム】
バッテリータイプ: 着脱式リチウムイオン
バッテリー容量: 23.04Wh
連続稼働時間: 60分(連続スキャン)
充電時間(25°C/77°F): 0–90% 約70分
0–100% 約90分
動作温度: -20°C 〜 45°C
※直射⽇光は不可
充電温度 :5°C 〜 30°C
【LiDARシステム
】
レーザー分類: <20W
測定範囲 :0.1m–30m(反射率10%)
最⼤60m(反射率90%)
視野⾓: ⽔平180° × 垂直180°
点群取得速度 :856,000点/秒
【カメラシステム
】
カメラ構成: 4カメラアレイ
(⿂眼×2、フロント×2)
解像度 :4000 × 3000 px
センサーサイズ: 1/2インチ CMOS
シャッター⽅式: ローリングシャッター
⿂眼カメラ視野⾓ :200° × 200°(各カメラごと)
フロントカメラ視野⾓ :100° × 85°(各カメラごと)
【電源アダプター
】
⼊⼒ : 100–240V、50–60Hz 1.5A、80VA
出⼒ : 20V、2.0A
定格 : PDプロトコル、>25W
標準:USB-C 45W 単⼀ポート
デュアルポート:25W + 20W
【付属品・オプション
】
デバイス保護ケース: 同梱
延⻑ポール(2m) :オプション
外部ストレージ(512GB / 1TB SSD) :オプション
LixelKity K1
電源入力 :14.4V
消費電力 :20W未満
重量 :約1kg
インターフェース: USB 3.1 Gen2
記録媒体 :TFカード 256GB
接続方式: WiFi / Bluetooth 2.4GHz 5GHz
動作温度範囲: -20℃ ~ 50℃
保護等級: IP54
筐体素材 :アルミニウム
電源方式 :着脱式バッテリー / 外部給電対応
稼働時間 :約1.5時間
バッテリー容量: 28.8Wh
カメラ数 :4基
APP通信距離 :最大20m(WiFi接続)
【LiDAR仕様】
相対精度 :±1.2cm
再現精度 :±2cm
絶対精度 :±3cm
水平角度精度 :±0.015°
測定範囲 :0.1〜40m(反射率10%)、最大70m(80%)
スキャン方式: モバイルスキャン
スキャン速度: 200,000点/秒
レーザー仕様: Class 1 / 905nm
視野角(FOV): 360° × -7°〜+52°
【カメラ・ビジョンモジュール】
カメラ画角: 360° × 360°(全周カラーパノラマ)
解像度: 48MP ×2(最大56MPパノラマ画像)
【データ処理・保存】
計算モード :リアルタイム計算 / ハイブリッド計算(リアルタイム+後処理)
処理ソフト: Lixel Studio(Windows向け後処理ソフトウェア)
対応点群フォーマット: .las
カラー点群出力対応
RTKモジュール対応
Lixel L2 Pro
重量: 1.7kg
外形寸法 :180mm × 130mm × 400mm
筐体素材: 工業用アルミニウム
消費電力: 30W未満
連続稼働時間: 約1.5時間
ストレージ: 1TB SSD
インターフェース: USB 3.1 Gen2
ワイヤレス WiFi: 802.11 a/b/g/n/ac
Bluetooth
:2.4GHz:2412–2472MHz
5GHz:5180–5240MHz / 5745–5825MHz
環境性能
動作温度: -20℃ ~ 50℃(-4℉ ~ 122℉)
保護等級: IP54(防塵・防滴)
主な機能
ビジュアルポジショニング
リアルタイムRTK融合
リアルタイムRGBカラーキャプチャ
出力形式
点群データ: .las
静止画データ: .jpg
リアルタイム精度(RMSE)
絶対垂直精度: ±3cm
絶対水平精度: ±3cm
相対精度: ±2cm
処理後の精度(RMSE)
絶対垂直精度: ±3cm
絶対水平精度: ±3cm
相対精度: ±1cm
再現精度: ±2cm
点群厚み: 0.5cm
水平精度(RTK使用時):0.015°
垂直精度 :0.03°
LiDAR仕様
測定範囲: 0.5〜120m / 0.5〜300m(モードにより)
センサー: Class 1 / 905nm
スキャン周波数: 320,000 / 640,000 点/秒
視野角(FOV): 360° × 270°
カメラ仕様
パノラマカメラ
解像度: 48MP × 2
センサー :CMOS 1/2”
焦点距離 :2mm
絞り値 :F2.0
シャッター ローリングシャッター
視野角 :190° × 190°
最大解像度: 56MP
ビジュアルポジショニング用カメラ
解像度: 1MP
シャッター グローバルシャッター
視野角 :190° × 119°
バッテリー・充電
電圧: 14.4V
容量: 46.8Wh
入力 :100〜240V, 50〜60Hz, 1.5A, 80VA
出力 :16.8V / 2.0A
定格出力 :34W
アクセサリー
輸送ケース 42cm × 34cm × 18cm / 総重量6.6kg
RTK仕様
標準RTK・サーベイグレードRTK共通
対応チャンネル:GPS(L1/L2/L5)、GLONASS(L1/L2)
BDS(B1/B2/B3)、Galileo(E1/E5a/E5b/E6b)
精度:水平 0.8cm + 1ppm、垂直 1.5cm + 1ppm
アンテナ:インピーダンス50Ω
右回り円偏波、水平カバレッジ360°
出力波:≦2.0、ゲイン:標準2.8dBi / 測量用5.5dBi
軸比(サーベイグレード):≦3dB
A. XGRIDSはLiDARとSLAMを活用し、歩くだけで空間を3Dデータ(点群)として取得できるハンディ型3Dスキャナーです。
A. 据置型と異なり移動しながら測定できるため、作業時間を大幅に短縮できます。
A. はい。専門知識がなくても操作できる設計になっています。
A. はい。SLAM技術によりGNSSが届かない屋内でも使用可能です。
A. レーザーを照射して距離を測定し、空間形状を取得する技術です。
A. 自己位置を推定しながら周囲の環境を同時にマッピングする技術です。
A. 空間の形状を点の集合として表現した3Dデータです。
A. ガウシアンスプラッティングによりリアルな3D表現を行う技術です。
A. 用途に応じた高精度計測が可能で、現場用途に十分対応します。
A. 構成や用途によって異なるため、お問い合わせください。
A. はい。実際の現場に合わせたデモを実施可能です。
A. お問い合わせ → ヒアリング → デモ → ご提案 → 導入の流れになります。
A. 条件により活用可能な場合がありますのでご相談ください。
A. 対応可能です。詳細はお問い合わせください。
A. 進捗管理や出来形管理に活用されます。
A. 橋梁・トンネルの点検データ取得に利用されます。
A. 設備管理やレイアウト確認に活用されます。
A. 物件の3D可視化やバーチャルツアーに活用されます。
A. 導入後のサポート体制も整えています。
A. 操作説明や運用サポートを提供しています。
A. 修理・サポート対応が可能です。
A. はい。活用方法まで含めてご提案します。
その他のご質問・無料デモ・お見積りはお気軽にお問い合わせください。

製品デモ、導入のご相談、お見積り、お問い合わせなどお気軽にご連絡ください。検証と実績に基づいた、最適なご提案をさせていただきます。
導入後のサポートもご安心ください。ご説明と合わせて、自社制作の動画マニュアルのご提供やメールサポートなど、ご利用いただけるように努めております。
